
ID : 1999
基准坐标的设定
设定各机器人的基础坐标。
基础坐标的设定方法有2种,包括通过直接输入进行设定的方法,以及通过简单教导进行设定的方法。
可通过主局控制器对所有机器人进行基础设定。
进行此操作前,需要通过LAN连接主局控制器和子局控制器,并启动子局控制器。
通过直接输入进行设定的方法
下面就使2台机器人联动时的设定方法进行说明。
1
进行Robot0的基础设定(也可以从Robot1开始进行)。
通过多功能教导器操作及设定机器人基本上都是针对指定为领导的机器人进行。
因此,首先将Robot0指定成领导。
按压画面上部的“机器人选择”按钮,显示如下所示的“机器人选择”画面。
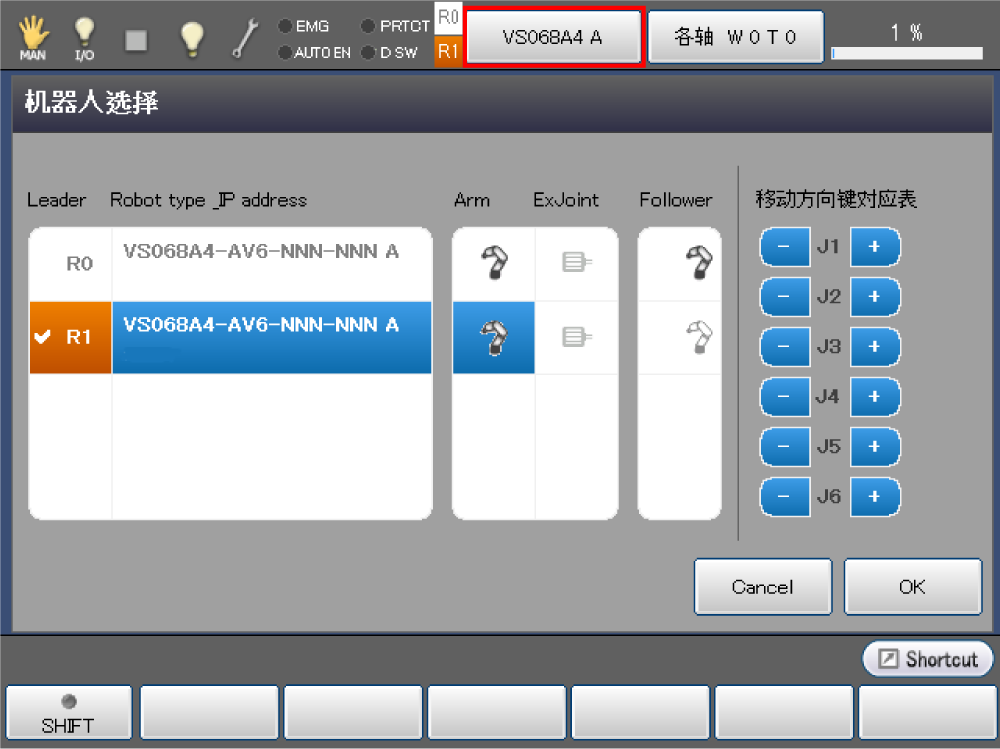
2
选择“R0”后按压[OK]。
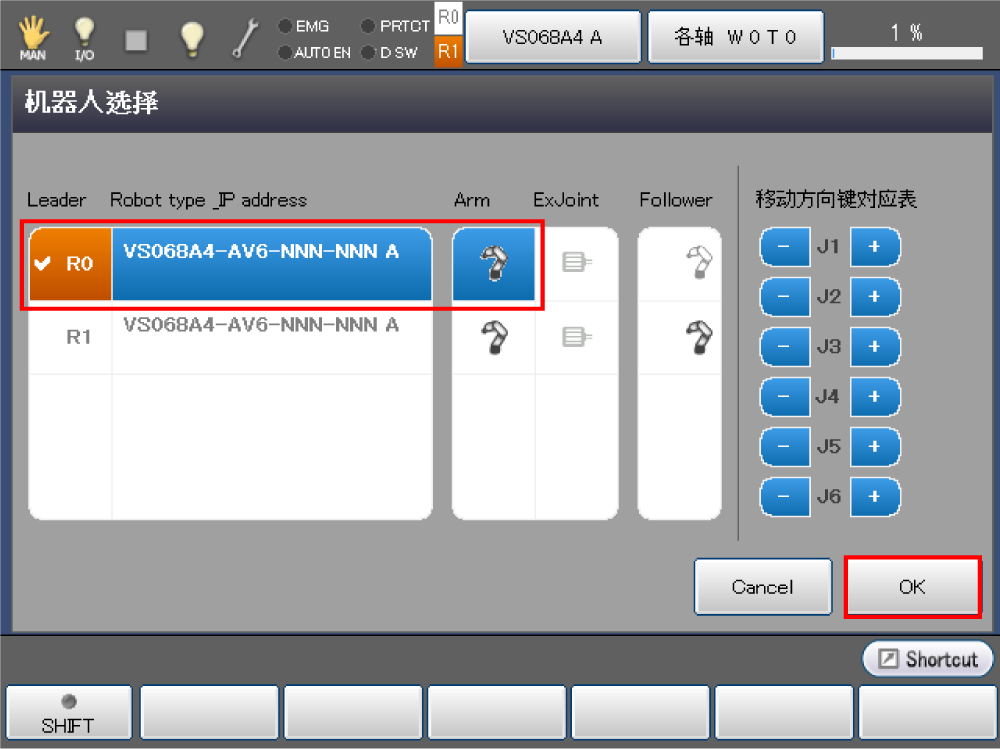
Robot0被指定成领导。
3
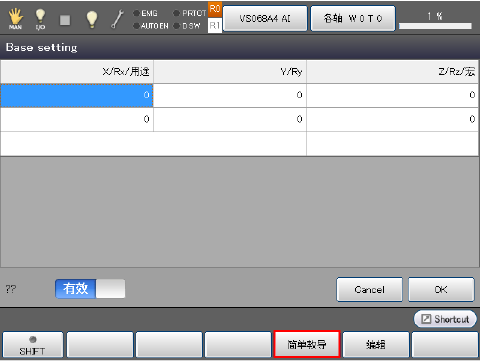
按压基本画面-[F2 机械臂]-[F6 辅助功能]-[F10 基准]。
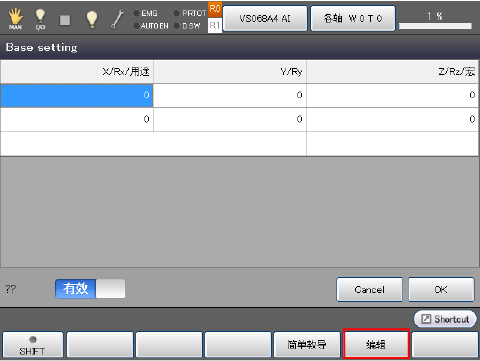
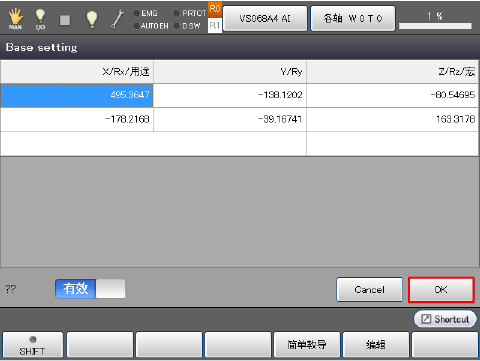
显示“基准设定”画面
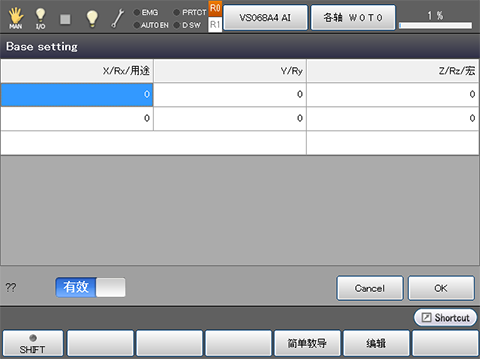
4
选择要输入的项目并按压[F5 编辑]。
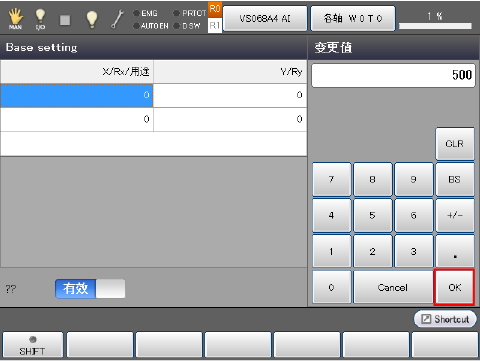
5
显示数字键后,使用数字键输入值并按压“OK”。
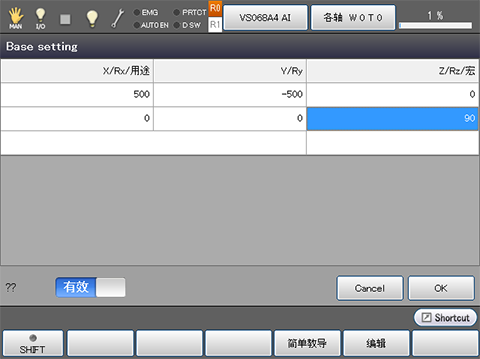
6
重复STEP4、5以输入必要项目。
7
全部输入后,确认启动时设定为“有效”并按压“OK”。
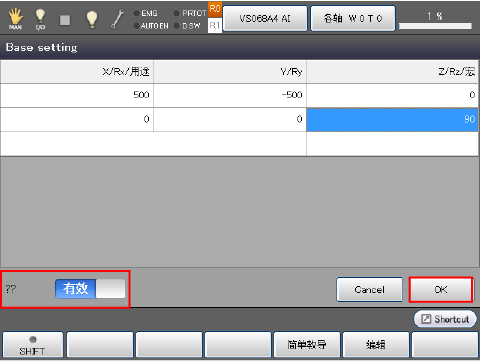
- 用途栏、宏栏仅可显示不能编辑。
- 设定值会立即反映出来。
Robot0的基础设定结束。
8
请按相同的步骤对Robot1进行基础设定。之后,同时启动所有机器人控制器。
启动时“有效”在重启前不会变为有效。
9
按压基本画面-[F2 机械臂],按压[LOCK],确认设定的基准坐标中有机器人。
请通过手动模式进行确认。
通过简单教导进行设定的方法
下面就使2台机器人联动时的设定方法进行说明。
预先对Robot0和Robot1的世界坐标系原点、X轴向点、X-Y平面上的点这三点进行教导,登录其位置坐标(P型变量),对使用登录位置坐标数据的基础坐标进行设定。
关于各点,请参照下表。
| X轴上的点 | 指定X轴上X>0的任意点。 |
|---|---|
| X-Y平面上的点 | 指定X-Y平面上Y>0(第1象限、第2象限)的任意点。 如果指定Y<0,Y轴、Z轴的方向可能成为没有打算的朝向。 另外,指定Y=0的点时,由于无法计算因此不输出计算结果。 |
通过简单教导进行3点教导时,请通过Work0(基准坐标)进行。
教导方法请参照“获取领导机器人的位置”。
前导的切换方法与显示基准设定画面为止,通过直接输入进行设定的方法中的STEP1~3相同。
1
进行Robot0的基础设定(也可以从Robot1开始进行)。
实施通过直接输入进行设定的方法的STEP1~3,打开Robot0的基础设定画面。
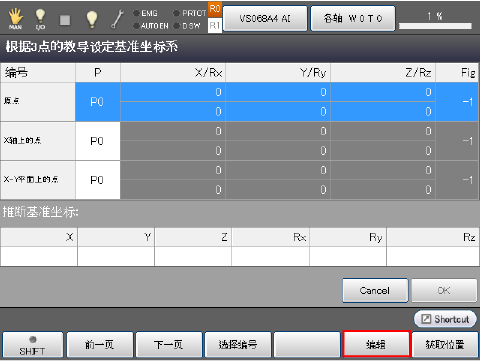
之后,按下“基础设定”画面中的[F4 简单教导]。
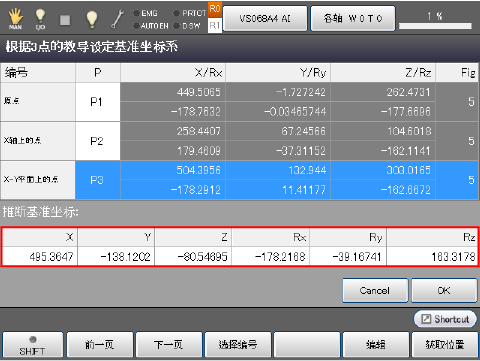
显示“通过3点教导设定基准坐标系”画面。
2
选择“原点”栏并按压[F5 编辑]。
3
显示数字键后,使用数字键输入登录原点坐标的变量编号并按压“OK”。
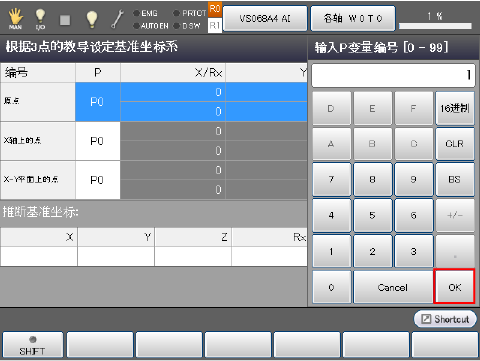
按相同步骤登录X轴方向的点、X-Y平面上的点。
登录所有点后,将确定“推断基准坐标”的值。
4
如果按压[OK],即可确定基准坐标。

5
确认启动时设定为“有效”并按压“OK”。
Robot0的基础设定结束。
6
请按相同的步骤对Robot1进行基础设定。之后,同时启动所有机器人控制器。
启动时“有效”在重启前不会变为有效。
7
基准坐标的确认与通过直接输入进行设定的方法中的STEP9相同。
ID : 1999