
ID : 162
ArchMove
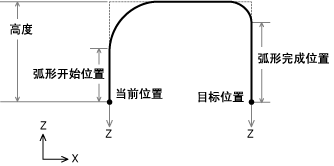
功能
做弧形动作。
格式
ArchMove 目标位置, 高度[, 弧形开始位置[, 弧形完成位置]]
指定项目
相关项目
注意事项
不能向ArchMove执行通过动作。对于ArchMove前的动作命令,目标位置选项请选择通过动作以外。
向Move P, @0 P[0] '目标位置P[0]执行结束动作
向ArchMove P[1], 20 '目标位置P[1]以高度20'执行弧形动作应用示例
'!TITLE "目标位置的弧形动作移动"
' 当前位置至目标位置的弧形动作移动
Sub Sample_ArchMove
TakeArm Keep = 0
Dim aaa As Position
Dim bbb As Position
' 在aaa中代入当前位置
aaa = CurPos
bbb = Dev( aaa, P( -200, 50, 100, 0, 0, 0, -1 ) )
' 将高度150的弧形动作移动至目标位置bbb
ArchMove bbb, 150
' 移动至aaa的坐标位置
Move P, aaa
' 将高度为150、弧形开始位置、完成位置80的弧形动作移动至目标位置bbb。
ArchMove bbb, 150, 80, 80
End SubID : 162