
ID : 7280
動作準備
下記の状態から、COBOTTAの動作を開始するためには、動作準備が必要です。
- COBOTTAの起動時
- セーフティ関係のエラー状態(LEDが赤色)を解除したとき
- 非常停止入力信号または防護停止入力信号を、いったん開放し、その後短絡したとき
- COBOTTAへセーフティのデータを送信したとき
動作準備が完了するまでは、モータON、プログラム起動(ロボットコマンドの実行)、ダイレクトティーチング、ブレーキ解除ができません。
操作方法
以下の3つの方法があります。
COBOTTAパラメータツールでCOBOTTAにセーフティのデータを送った場合は、TPアプリの動作準備画面でパラメータの確認が必要です。
TPアプリで確認するまで、I/Oコマンドまたはロボットプログラムによる、動作準備が実行できません。
以下、各方法について説明します。
アプリによる操作
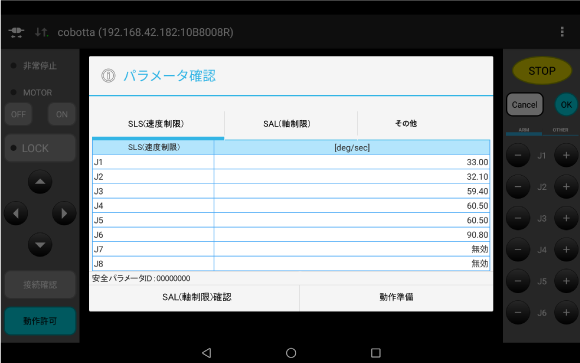
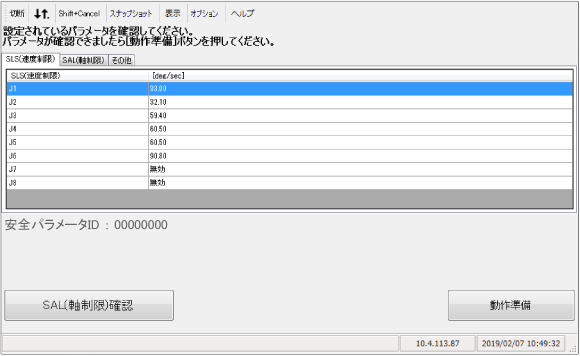
リモートTPまたはバーチャルTPで操作を行う場合、動作準備が必要な状態では、下記の画面が表示されます。
すべてのパラメータを確認すると、[動作準備]ボタンが有効になりますので、[動作準備]ボタンを押します。下記の画面が消えたら、動作準備が完了です。
なお、ある状況では、動作準備を実施後、エラーが発生することが繰り返されてしまう場合があります。この場合の対応方法については "動作準備後にエラーが繰り返し発生する場合" を参照してください。
- リモートTP
- バーチャルTP
安全パラメータID
安全パラメータIDはパラメータの設定値によって変化する固有の値です。
COBOTTAに格納されている安全パラメータがどのシーンのものかを確認するために使用します。
詳しくは「シーン毎に管理する」を参照してください。
I/Oコマンドによる操作
I/Oコマンドを実行します。
I/Oコマンドの内容は、"フィールドネットワークインターフェースモジュール" の使用状況によって異なります。
フィールドネットワークインターフェースモジュールを使用しない場合
I/Oコマンドの使い方については、"I/Oコマンドの使用方法" を参照してください。
| I/O割付の種類 | コマンド領域 | データ領域 |
|---|---|---|
| Mini I/O専用 | 000 運転準備 | 001 モータON 010 外部速度100(SP100) 100 動作準備 111 上記全て(動作準備→モータON→SP100) |
複数の入力が入っている場合は、動作準備→モータON→SP100の順で処理されます。
フィールドネットワークインターフェースモジュールを使用する場合
詳細は、 "I/Oコマンドの一覧" を参照してください。
| I/O割付の種類 | コマンド領域 | データ領域1 |
|---|---|---|
| 標準 | 0111 モード切り替え | 00000001 モータON 00000010 外部速度100(SP100) 00000100 動作準備 00000111 上記全て(動作準備→モータON→SP100) |
ロボットプログラムによる方法
下記のPacScriptのコマンドを使用します。各コマンドの詳細は、下記参照先をご覧ください。
| コマンド (参照先) |
機能 |
|---|---|
| MotionPreparation |
動作準備を自動で実行します。 |
| GetMotionPreparationState | 動作準備完了状態を取得します。 |
ID : 7280
- このページに関連する情報
- 動作準備後にエラーが繰り返し発生する場合