
ID : 4870
概要
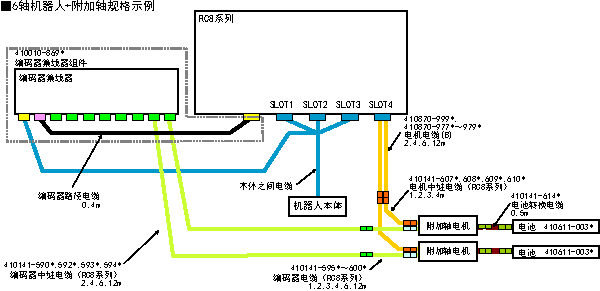
机器人构成
附加轴机器人在以下几点与标准机器人组不同。
- 使用配置与使用的附加轴电机对应的驱动板的机器人控制器
- 使用附加轴电机电缆、附加轴电机转换电缆、附加轴编码器电缆以及编码器备份电池(全部选件),连接机器人控制器与附加轴电机。
- 6轴机器人从附带总线编码器的电机(选件)中最多采用2个附加轴用电机,4轴机器人最多采用4个附加轴用电机。
UL规格以外
无法看清上图时请点击此处。(PDF:196KB)
UL规格

无法看清上图时请点击此处。(PDF:193KB)
附加轴功能
这是用机器人控制器(RC8系列)的统一接口,控制有别于机器人的轴(附加轴)的功能。
附加轴参数的设定功能
使用附加轴时,需要设定附加轴的动作条件(速度、加速度、可动范围等)的“轨道参数的设定”、设定附加轴伺服系统的增益等的“伺服参数的设定”2个项目。
附加轴的增益调整功能
附加轴的增益调整有自动增益调整和手动增益调整两种。
-
自动增益调整
按照在控制器内部预先规定的模式进行加减速动作,根据当时的动作推测负荷惯量,据此自动设定合适的增益。易于调整附加轴电机的增益。
ID : 4870