
ID : 5087
伺服参数的设定
设定附加轴伺服系列的增益等。
以下显示多功能教导器操作时的设定步骤。
伺服参数设定方法
1
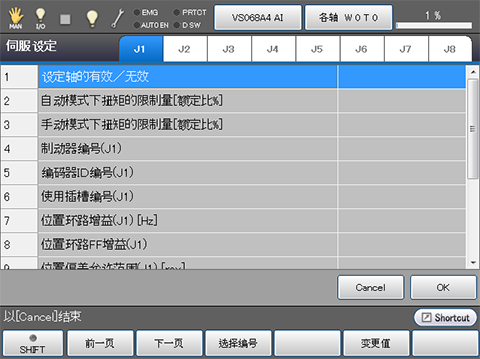
按压“轴设定”画面-[F5 伺服设定],显示如下所示的“伺服设定”画面。
2
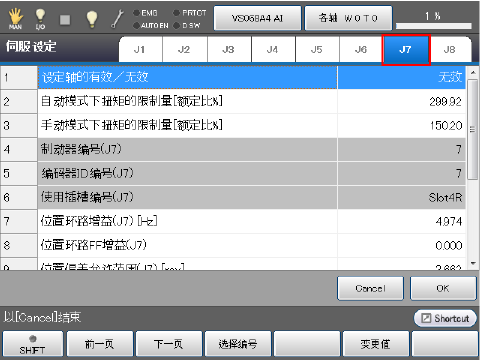
选择执行设定的标签。
选择7轴时,显示如下所示。
3
变更伺服参数的各设定后,按压[OK]。
关于各参数的详细内容,请参照以下“伺服参数一览”。
4
所有伺服参数的设定完成后,按压[OK]。
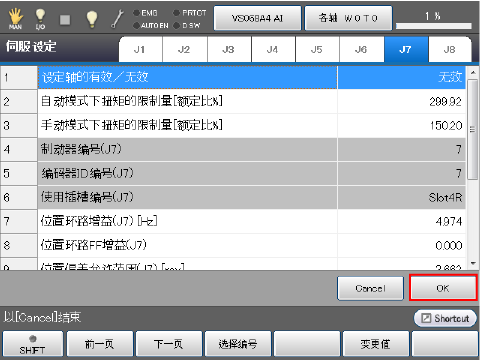
保存登录的伺服参数设定,返回“轴设定”画面。
伺服参数一览
| 参数名称 | 设定范围 | 出厂设定值 | 单位 | 内容 | 备注 |
|---|---|---|---|---|---|
|
轴有效无效设定 (无效、有效、仅编码器有效) |
无效、有效、仅编码器有效 | 无效 | 连接并驱动电机时设定为“有效”,仅使用编码器时设定为“仅编码器有效”。 | 设定为[仅编码器有效]时,在电机ON时解除制动器。注意,施加偏负荷时,将沿偏负荷方向动作。 | |
|
自动时扭矩限制量 [额定比%、0=Default] |
0~400 | 324 | % | 设定自动模式时的扭矩限制量。 | |
|
手动时扭矩限制量 [额定比%、0=Default] |
0~400 | 150 | % | 设定手动模式时的扭矩限制量。 | |
| 制动器编号 | *轴编号 | 显示电机制动器继电器编号 | 无法变更 | ||
| 编码器ID编号 | *轴编号 | 显示编码器ID编号 | 无法变更 | ||
| 使用插槽编号 | *轴编号 | 显示功率模块插槽编号 | 无法变更 | ||
| 位置比例增益[Hz] | 0~100 | 2.487 | Hz | 设定位置控制系统的应答性。值越大,定位时间越短。 | |
| 位置前馈增益 | 0~2 | 0.000 | 设定位置控制系统的速度前馈量。虽然值越大,位置偏差越小,且应答性提高,但容易发生超程。 | ||
| 位置偏差允许范围[rev] | -1000~1000 | 3.662 | rev | 设定位置偏差的容许范围。出现超出设定范围的位置偏差时,发生错误。 | 设定的位置偏差允许范围需符合公式。 |
| 速度比例增益[Hz] | 0~1000 | 15.803 | Hz | 设定速度控制系统的应答性。由于值越大,可以将位置比例增益设定的越大,因此可以提高应答性。 | |
| 速度积分增益[ms] | 0~100 | 10.000 | ms | 设定速度控制系统的积分补偿增益。如果设定值较大,则停止后的速度偏差会很快结束。 | |
| 扭矩指令低通滤波器2时间常数2[ms] | 0~327.67 | 0.532 | ms | 设定扭矩指令部的一阶滞后滤波器的带宽。值越小,滤波器的截止频率越小。 | |
|
扭矩偏移设定 [额定比%] |
-100~100 | 0 | % | 设定扭矩指令值的偏移值。对电机施加偏负荷(沿重力方向动作)时,通过偏移补偿偏负荷。 | 自动增益调整时,如果设定为“有重力补偿”,则自动设定扭矩偏移值。 |
| 电机型式编号 | *轴编号 | 无法变更 |
参数详细说明
位置比例增益
位置比例增益的值越大,定位时间越短。
但是,如果增大后的增益值超过机械系统的固有振动数,则容易发生振动和超程。
标准为机械系统固有振动数的1/2π。
例如,固有振动数为20[Hz]时,将位置比例增益设定为20/2/π=3.2[Hz]。
位置前馈增益
设定位置控制系统的速度前馈量。如果设定值较大,则位置偏差变小,应答性提高。如果设定为“100”,则匀速动作时的位置偏差几乎为“0”。但是,如果设定值较大,则容易发生振动和超程。
位置偏差允许范围
设定位置偏差的容许范围。出现超出设定范围的位置偏差时,发生错误。设定的位置偏差允许范围需符合下列公式。
-
[位置偏差允许范围(rev)]>[电机最高速度设定值(rpm)]×(1.0-[位置前馈增益(%)]×0.01)/[位置比例增益(Hz)]/377
※:377 = 60*2*π
速度比例增益
设定速度控制系统的应答性时,输入目标应答频率(Hz)。由于值越大,可以将位置比例增益设定的越大,因此机器人的动作速度会变快。
为达到机器人的负荷和惯量为0%时的应答频率,系统会自动切换内部的各种设定值。因此,根据实际的负荷和惯量,可能不会按照显示的应答频率动作。
速度积分增益
设定速度控制系统的积分补偿增益。
如果设定值较大,则积分时间常数变小,停止后的速度偏差会很快结束。但是,如果对刚性较低的机械设定较大的值,则余留振动的结束性能下降。
扭矩指令低通滤波器2时间常数2
设定扭矩指令部的一阶滞后滤波器的带宽。
值越小,滤波器的截止频率越小。
扭矩偏移设定
设定扭矩指令值的偏移值。通过重力等向电机施加偏负荷时,通过扭矩偏移补偿偏负荷。最大可设定与额定扭矩程度相当的偏移。
一旦设定较大的扭矩偏移,附加轴在接通电机电源后可能会立即沿设定方向动作。通过“伺服log”确认扭矩指令值和偏差波形后,逐渐变更扭矩偏移值。
另外,自动增益调整时,如果选择“有重力补偿”,则自动设定扭矩偏移值。
ID : 5087
- 本页相关信息
- 伺服Log
- 伺服LOG的图表显示方法