
ID : 5095
伺服Log
详细记录电机控制的功能。
伺服Log记录条件
记录间隔可从1~8ms中选择并记录。
记录时间可从10s~60s中选择。
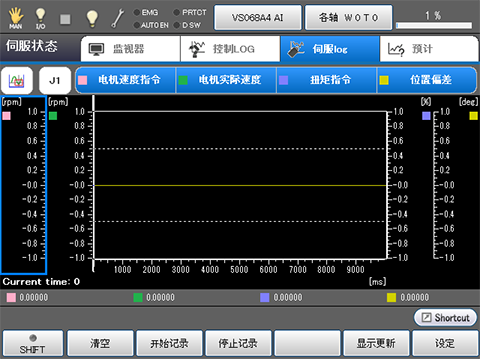
可记录的数据有以下7种。可一次记录2种数据。
-
电机速度指令
电机旋转速度的指令值。单位为(rpm)
-
电机实际速度
电机旋转速度的实际测量值。单位为(rpm)
-
扭矩指令
从电机的扭矩指令值中除去扭矩偏移的值。单位为额定扭矩比(%)
-
位置偏差
电机角度指令值和电机角度实际测量值的偏差。单位为,直动轴(deg)、旋转轴(mm)
-
电流值
电机的电流值。单位为额定电流比(%)
-
指令值
电机的角度指令值。单位为角度(deg)
-
编码值
电机的编码值。单位为角度(deg)
伺服Log设定步骤
说明设定步骤。
1
按压基本画面 - [F2 机械臂] - [F3 伺服状态] - [伺服Log]标记 - [F6 设定]。
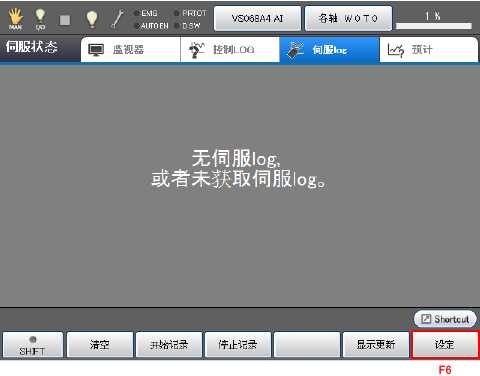
显示“伺服Log设定”画面。
2
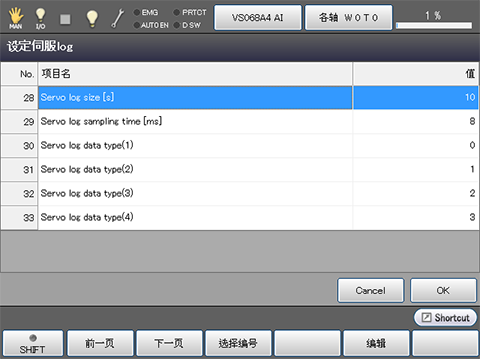
变更伺服Log设定参数的各设定,按压[OK]。
3
所有伺服Log设定参数的设定完成后,按压[OK]。
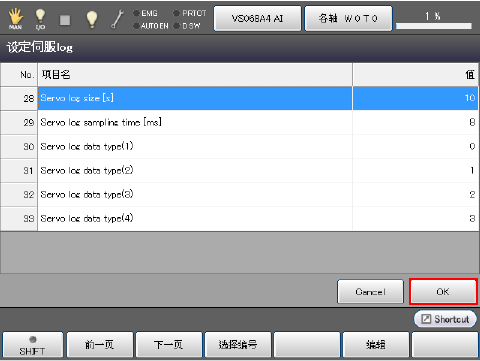
保存登录的伺服Log设定参数的设定,返回“伺服状态”画面。
伺服Log记录开始、停止方法
以下为伺服Log的记录方法。
- 通过程序使用并记录指令
- 操作多功能教导器并直接手动记录
使用程序的伺服Log记录方法
通过程序执行伺服Log的记录开始“SysLog.Servo.Start”、停止“SysLog.Servo.Stop”、初始化“SysLog.Servo.Clear”,并设定伺服Log记录的时机。
详细内容请参照“SysLog.Servo.Start”、“SysLog.Servo.Stop”、“SysLog.Servo.Clear”。
在记录开始到停止期间发生错误等,并且电机电源OFF时,记录电机OFF后3.2秒间的数据。
通过操作多功能教导器记录伺服Log的步骤
说明通过操作多功能教导器记录伺服Log的步骤。
1
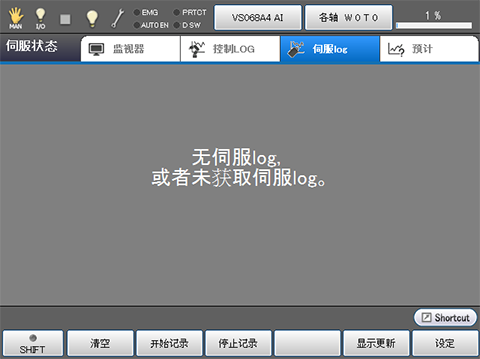
按压基本画面 - [F2 机械臂] - [F3 伺服状态] - [伺服Log]标记。

显示“伺服状态”画面。
2
按压[F2 记录开始]。
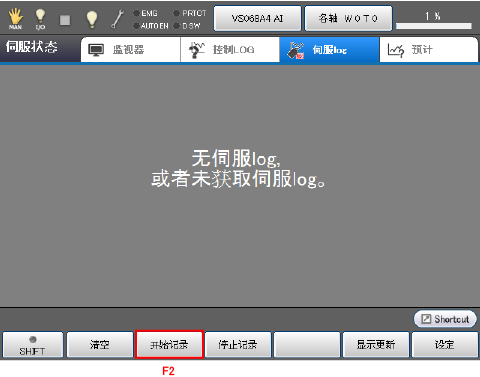
开始记录伺服Log,在[伺服Log]标记处显示“REC”。
超过在“伺服Log设定”画面设定的[伺服Log记录时间]后,自动停止记录并且“REC”显示消失。
3
按压[F5 显示更新]。
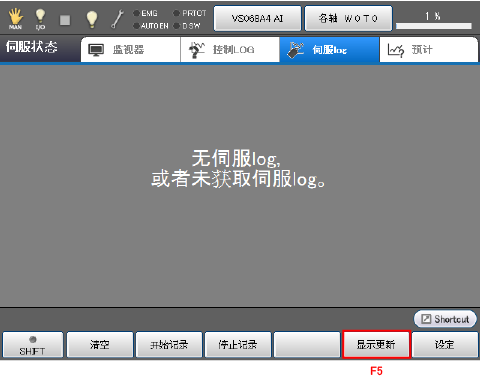
读取记录的伺服Log。
显示记录的伺服Log。
ID : 5095