
ID : 5086
轨道参数的设定
设定附加轴的动作条件(速度、加速度、可运行范围等)。
以下显示多功能教导器操作时的设定步骤。
“轴设定”画面的显示
按压基本画面-[F2 机械臂]-[F12 维护]-[F10 轴设定]。

显示“轴设定”画面。

轨道参数设定方法
1
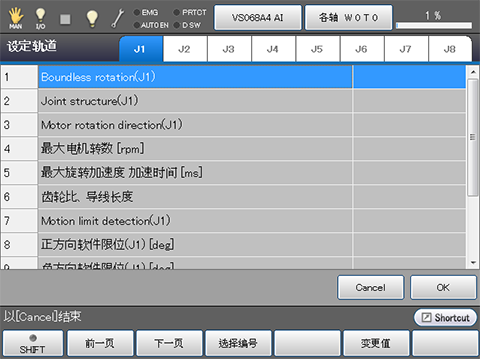
按压“轴设定”画面-[F4 轨道设定]后,显示如下所示的“轨道设定”画面。
2
选择执行设定的标签。
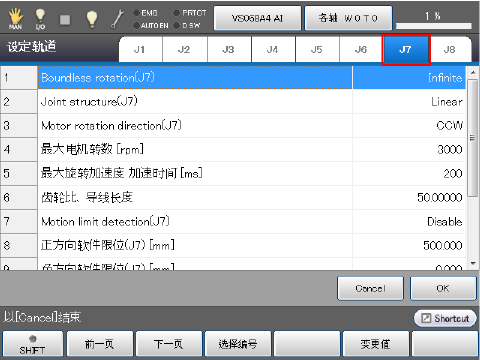
选择7轴时,显示如下所示。
3
变更轨道参数的各设定后,按压[OK]。
关于各参数的详细内容,请参照以下“轨道参数一览”。
4
所有轨道参数的设定完成后,按压[OK]。
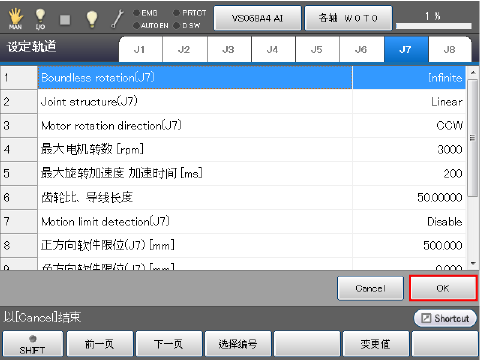
保存登录的轨道参数设定,返回“轴设定”画面。
再次接通控制器电源后,变更的参数有效。
轨道参数一览
| 参数名称 | 设定范围 | 出厂设定值 | 单位 | 内容 | 备注 |
|---|---|---|---|---|---|
|
无限旋转 (有限、无限) |
“有限”或“无限” | 有限 | 电机沿固定方向旋转32768次以上时,设定为“无限”。 | 设定为无限时,请将软件限制检查设定为“无”。 | |
|
直动旋转设定 (直动轴、旋转轴) |
“直动轴”或“旋转轴” | 直动轴 | 连接电机的附加轴为直动轴时设定为“直动轴”,为旋转轴时设定为“旋转轴”。 | ||
|
旋转方向 (CCW、CW) |
“CCW”或“CW” | CCW | 电机的CCW方向(从负荷侧看)作为附加轴的+方向时设定为“CCW”,作为-方向时设定为“CW”。 | ||
| 最大电机转速[rpm] | 1~6000 | 3000 | rpm | 设定电机的最大转速。 | |
| 最大旋转加速度、加速时间[ms] | 1~100000000 | 200 | ms | 设定电机到达最高速度前的加速时间。 | |
| 传动比、导程长度 | 0.00001~21474.83647 | 50.00000 | 旋转轴时设定减速比(电机旋转量/轴旋转量),直动轴时设定电机旋转1圈的移动量(导程)。 | ||
|
软件限制检查 |
“无效”或“有效” | 有效 | 检查动作范围,如果在范围外时会发生错误,则设定为“有效”。 | 无限旋转设定为“无限”时,将该设定设定为“无效”。 | |
| 正方向软件限制[mm]、[deg] | -1000000~1000000 | 500 |
旋转轴时:deg 直动轴时:mm |
设定正方向的动作范围。 | |
| 负方向软件限制[mm]、[deg] | -1000000~1000000 | 0.000 |
旋转轴时:deg 直动轴时:mm |
设定负方向的动作范围。 | |
| RANG[mm]、[deg] | -21474.83648~21474.83648 | 0.00000 |
旋转轴时:deg 直动轴时:mm |
设定RANG值。 | |
| 旋转半径[mm] | 0~100000 | 1000 | mm |
旋转轴时,设定最大的旋转半径。 直动轴时,无需设定。 |
设定时的详细内容,请参照“旋转半径的设定”。 |
| 自动POSCLR | “无效”或“有效” | 有效 |
设定是否自动执行POSCLR。 |
(注1)
|
(注1):自动POSCLR为“有效”且当前位置为360°的倍数时,通常变更为0°,但是由于内部的演算误差,可能变更为360°。同样,为-方向360°的倍数时,可能变更为-360°。因此请注意,下一动作命令可能不是所指定的动作。
ID : 5086