
ID : 3315
并用电动夹治具和力感应器时的注意事项
并用电动夹治具和力感应器(依从功能)时,需要在机器人控制器中安装以下机器。
- 电动夹治具的控制
- 电动夹治具控制板
- 与力感应器的通信
- RS-422A通信板或RS-422A微型转换器
这里包括“与力感应器的通信”中使用的不同机器注意事项。
使用RS-422A通信板时注意事项
由于电动夹治具控制板和RS-422A通信板都是PCI板,因此不可将两种板安装到1个机器人控制器。
此外,在并用Ethernet和EtherCAT的机器人控制器间通信方法中,由于主局控制器上安装有EtherCAT主局板(PCI板),因此不可安装电动夹治具控制板和RS-422A通信板。
因此,要将电动夹治具控制板2CH和RS-422A通信板(4通道件)安装到各自的子局控制器。
下图为在使4台机器人联动时,在所有机器人上安装电动夹治具和力感应器时的配线示例。
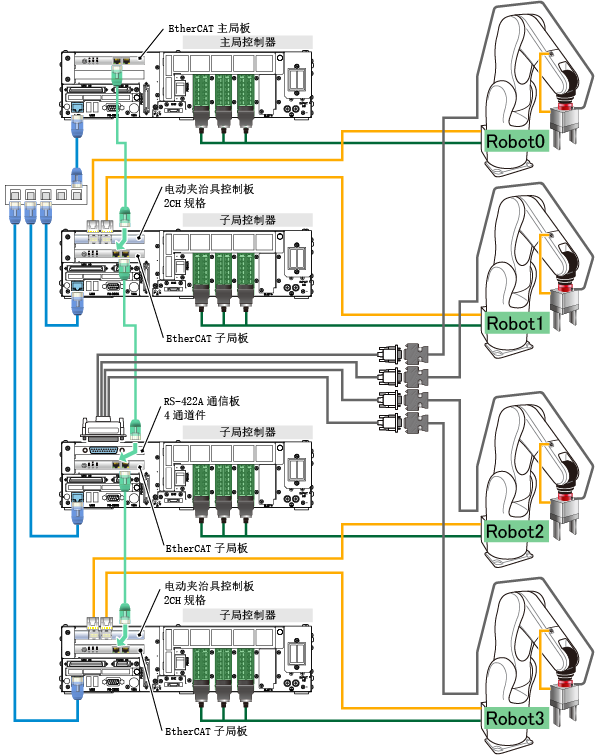
另外,在各板的构成方面,可并用的电动夹治具及力感应器最大数量会因要联动的机器人台数而异。
(如果在力感应器的通信中使用RS-422A微型转换器,可以按要联动机器人的台数使用电动夹治具及力感应器。)
| 要联动的机器人台数 | 可并用的最大数量 | |
|---|---|---|
| 电动夹治具 | 力感应器 | |
| 2 | 不能并用 | |
| 3 | 2 | 3 |
| 4 | 4 | 4 |
安装在各子局控制器上的电动夹治具控制板及RS-422A通信板可以通过主局控制器进行控制。关于各板的控制方法,请浏览以下参照位置。
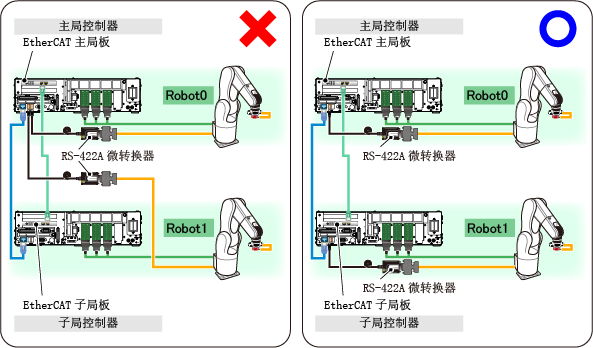
使用RS-422A微型转换器时注意事项
请勿将2个RS-422A微型转换器连接到1台机器人控制器,再让其中的一个与另一个机器人的力感应器进行通信。
1台机器人控制器请务必只连接1个RS-422A微型转换器使用。
另外,使用RS-422A微型转换器时,在连接后需要进行各种设定。请参照“在协调功能中使用力感应器的方法”。
此外,电动夹治具相关注意事项请参照“使用电动夹治具时的注意事项”。
ID : 3315