
ID : 3314
并用力感应器时的注意事项
注意事项有以下项目。
使用RS-422A通信板时
使用力感应器的依从功能时,将RS-422A通信板或RS-422A微型转换器安装到机器人控制器。
这是因为力感应器的通信方式为RS-422A,通过机器人控制器接收该力感应器的信息。
但是,在机器人控制器之间的通信方法中,当同时使用Ethernet与EtherCAT时,主局控制器内不能安装RS-422A通信板(因为EtherCAT主局板与RS-422A通信板都是PCI板)。
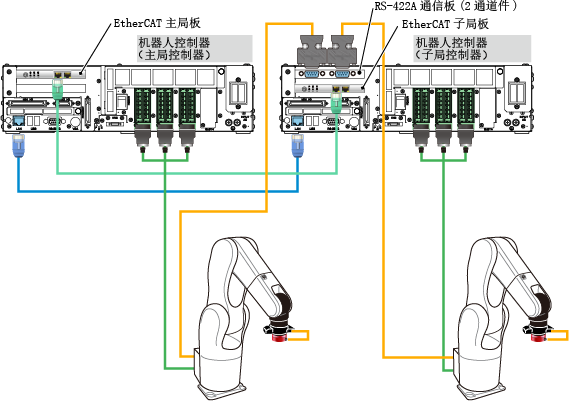
将与主局控制器相连的机器人(以后称 Robot0)上安装的力感应器信息读入RS-422A通信板时,将RS-422A通信板安装到子局控制器。
下图为在使2台机器人联动时,将力感应器安装到Robot0和Robot1时的配线示例。
在下图中,由于从Robot0和Robot1的力感应器读入信息,因此使用RS-422A通信板中的2通道件。
要联动3台以上的机器人时,也要根据使用的力感应器数,在各子局控制器上安装RS-422A通信板(1通道件/2通道件/4通道件)。
安装在子局控制器上的RS-422A通信板可以通过主局控制器进行控制。RS-422A通信板的控制方法请参照“在协调功能中使用力感应器的方法”。
使用RS-422A微型转换器时
请勿将2个RS-422A微型转换器连接到1台机器人控制器,再让其中的一个与另一个机器人的力感应器进行通信。
1台机器人控制器请务必只连接1个RS-422A微型转换器使用。
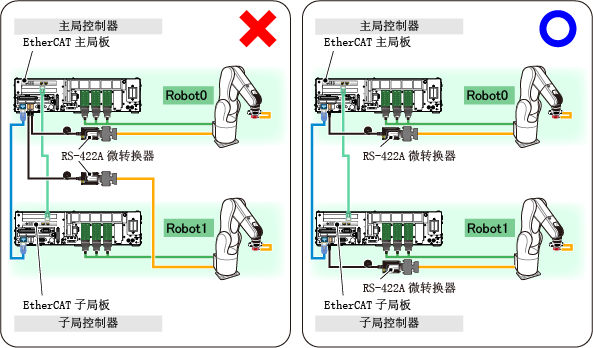
使3台以上机器人联动时或多任务正在执行等控制器的负载大时,如果在主局控制器上通过RS-422A微型转换器连接力感应器,可能发生通信超时或数据表异常的警告。此时,请将RS-422A通信板安装至子局控制器,连接力感应器。
另外,使用RS-422A微型转换器时,在连接后需要进行各种设定。请参照“在协调功能中使用力感应器的方法”。
关于许可证
力感应器的许可证只可用于任意一个机器人控制器。
只要将许可证注册到一个机器人控制器,就可使用所有的力感应器。
ID : 3314