| HUB |
请使用通信速度1Gbps以上的产品。
将WINCAPSIII(PC)之外的设备连接到HUB时,请通过实机确认是否对协调功能没有影响。
当连接通信量较多的机器(例 :照相机)时,在一定情况下机器人会错误停止,因此请尽量避免。
|
| Ethernet通信用LAN电缆 |
请使用6类以上的屏蔽电。
直连和交叉中的任意一种接线方式均可使用。 |
| EtherCAT通信用LAN电缆 |
请使用范畴为5以上的双绞线。
直连和交叉中的任意一种接线方式均可使用。
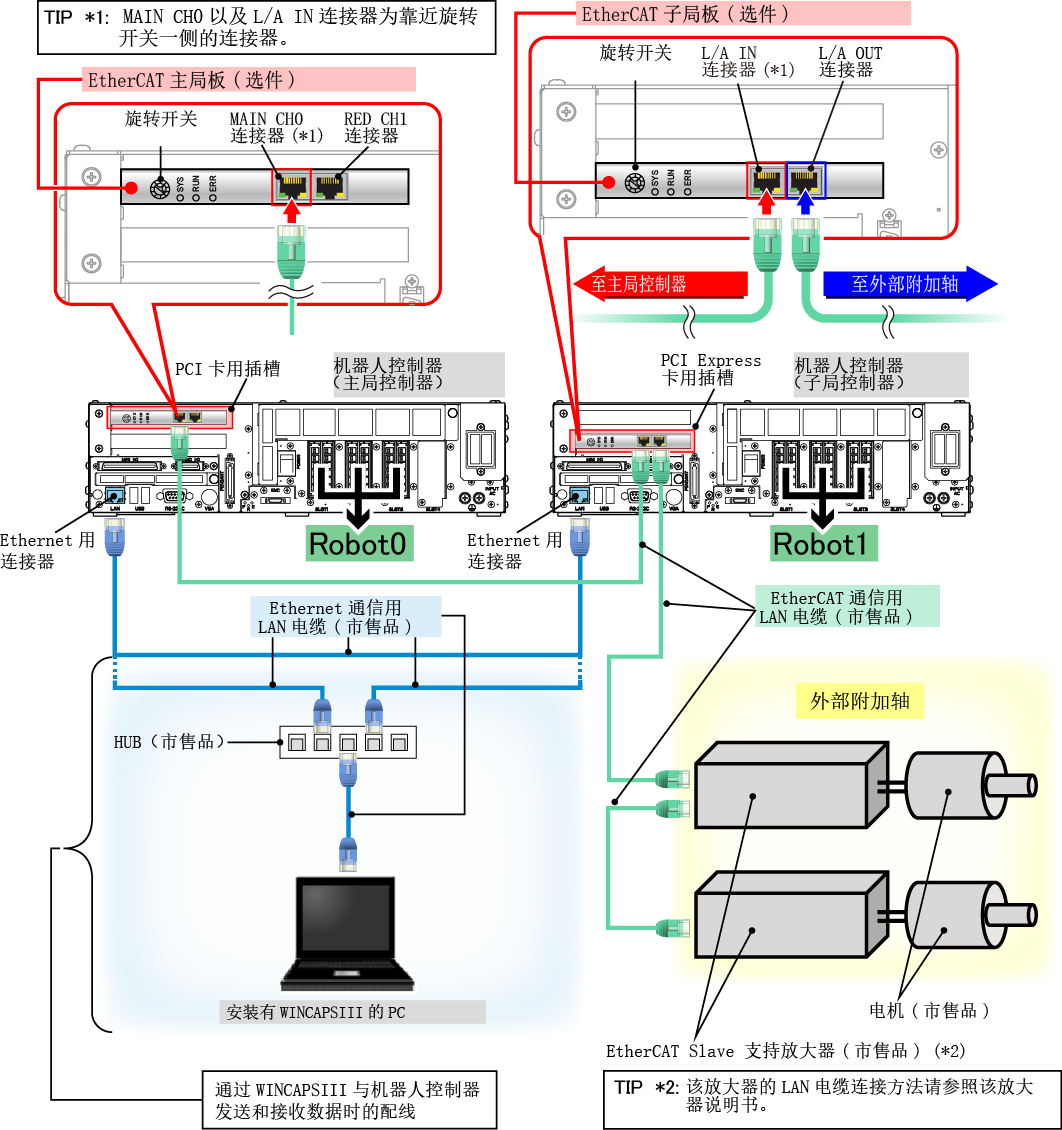
- 分别在EtherCAT主局板以及EtherCAT子局板中连接LAN电缆的连接器有2个。请务必连接到图示的连接器。
- 与EtherCAT主局板连接的机器请务必选择EtherCAT子局板。EtherCAT主局板与外部附加轴连接,并通过外部附加轴连接EtherCAT子局板时,将无法正确运行。
- EtherCAT主局板和EtherCAT子局板的状态请参照主局板的“LED显示”、子局板的“LED显示”。
|
| 选件 |
- EtherCAT主局板
-
主局控制器中除了EtherCAT主局板与协调功能(主局控制器用)的软件许可证之外,还需要外部附加轴的软件许可证。
但根据客户的不同使用情况,也可能无需购买。例如,对于已经使用了外部附加轴的机器人控制器,若需要能够同时使用协调功能,则只需购买协调功能(主局控制器用)的软件许可证即可。
下述表中标识了各产品的选件号,请根据客户的使用情况选择购买的产品。
-
- 需要协调功能(主局控制器用)与外部附加轴两者的软件许可证时(从以下选择)
|
| 产品 |
选件号 |
- EtherCAT主局板 (配套在控制器上出厂)
- 包括协调功能(主局控制器用)与外部附加轴的软件许可证
|
订购410010-858*和410002-862* |
- EtherCAT主局板(板单品出厂)
- 包括协调功能(主局控制器用)与外部附加轴的软件许可证
|
订购410010-859*和410002-863* |
- 仅协调功能(主局控制器用)的软件许可证
|
410002-775* |
- 仅外部附加轴的软件许可证
|
410002-863* |
|
|
| 产品 |
选件号 |
- EtherCAT主局板 (配套在控制器上出厂)
- 包括协调功能(主局控制器用)的软件许可证
|
410010-858* |
- EtherCAT主局板(板单品出厂)
- 包括协调功能(主局控制器用)的软件许可证
|
410010-859* |
- 仅协调功能(主局控制器用)的软件许可证
|
410002-775* |
- 无需协调功能(主局控制器用)的软件许可证时(从以下选择)
|
| 产品 |
选件号 |
- EtherCAT主局板 (配套在控制器上出厂)
- 包括外部附加轴的软件许可证
|
410010-848* |
- EtherCAT主局板(板单品出厂)
- 包括外部附加轴的软件许可证
|
410010-849* |
- 仅外部附加轴的软件许可证
|
410002-863* |
|
|
| 产品 |
选件号 |
- EtherCAT主局板(板单品出厂)
- 无软件许可证
|
410010-845* |
-
- EtherCAT子局板
- 请从以下选件号中选择。
-
| 产品 |
选件号 |
- EtherCAT子局板 (配套在控制器上出厂)
- 仅协调功能(子局控制器用)的软件许可证可从WEB上无偿下载
|
410010-773* |
- EtherCAT子局板(板单品出厂)
- 仅协调功能(子局控制器用)的软件许可证可从WEB上无偿下载
|
410010-774* |
- 协调功能(子局控制器用)的软件许可证获取方法请参照“选项功能和许可证”。
- 此外,子局控制器无需外部附加轴的软件许可证。
|
| 外部附加轴 |
- 可使用的支持EtherCAT Slave 的放大器
-
| 厂家 |
产品 |
| 山洋电气 |
SANMOTION R ADVANCED MODEL AC100V 200V规格
(仅高速通信规格 (型号:RS2*****H**)。但是,线性除外) |
| 安川电机 |
SGD7S EtherCAT AC100V AC200V AC400V规格
(型号:SGD7S-****A0********)
(但是,线性、直接驱动除外) |
Delta电子
(Ver.2.5.*以上版本可以使用) |
ASDA-A2-E系列(型号:ASD-A2-****-E)
(但是,线性除外) |
Panasonic
(Ver.2.5.*以上版本可以使用) |
- MINUS A5B (型号:M*DH*****B**)系列(M框除外)
- MINUS A6BE A6BF (型号:M*DL***BE*** or M*DL***BF***)系列
- MINUS A6BL A6BM (型号:M*DL***BL*** or M*DL***BM***)系列
线性电机可从2.9.*以后使用。直接驱动不可用
使用线性电机时,请在编码器的间距长1μm以上(例:5μm)、最高速度10m/s以内使用。
超过该范围时,请咨询本公司“营业”。
|
HIWIN
(Ver.2.7.*以上版本可以使用) |
- D1系列(支持EtherCAT的产品)
- D2系列(型号:D2-****-E-**)
(D1N系列除外。也支持线性)
|
- 注:*处有标识电源容量、编码器种类等的字符。
-
- 可连接的外部附加轴最大数
- 每1台机器人控制器具有规定的最大可连接外部附加轴数。
机器人控制器连接了4轴机器人时最大可连接4个外部附加轴,连接了6轴机器人时最大可连接2个外部附加轴。
例如,如果使2台机器人联动,在主局控制器、子局控制器都连接4轴机器人时,合计可连接8个外部附加轴。
哪个外部附加抽配置于主局控制器与子局控制器的哪一个取决于连接顺序。详细内容请参照“外部附加轴的连接构成”。
|
| 通过WINCAPSIII与机器人控制器发送和接收数据时的配线 |
调整协调功能的系统时,通过WINCAPSIII和主局控制器及子局控制器接收发送数据。在这种情况下,需要将安装了WINCAPSIII的PC、主局控制器、子局控制器全部相连。为此,如图所示配线。 |
| 其他 |
- 由于主局控制器中安装有EtherCAT主局板,因此无法并用PCI卡相同的电动夹治具口控制器板或并行I/O板。可并用CC-Link远程装置板等PCI Express板。
- 希望通过连接主局控制器的机器人使用电动夹治具时,请参照“使用电动夹治具时的注意事项”。
- 在子局控制器中不能使用现场网络。请利用WINCAPSIII将子局控制器的I/O配置设定成Mini I/O专用。
|