
ID : 2478
调整机器人时所需的接线
就安全动作规格时的机器人起动调整时在机器人单体上进行电机ON、自动运行、手动运行操作所必需的接线进行说明。
安全电路的输入信号是保证安全的重要信号。注意以下几点,必须用有接点的电路构成。
Mini I/O输入的构成
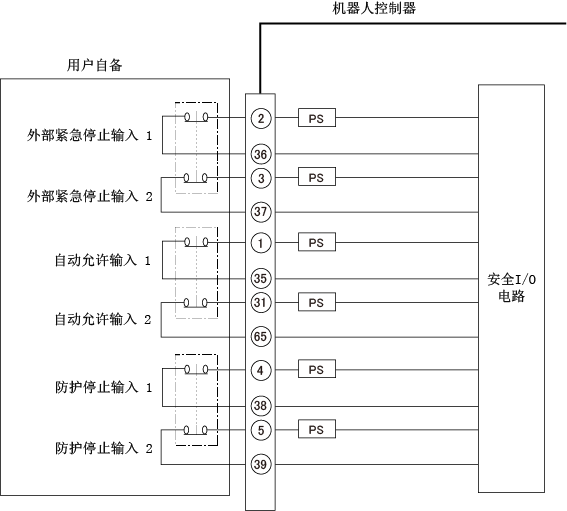
关于安全电路的整体构成,请参照Mini I/O使用说明书中的“[NPN型] RC8A 安全电路”或“[PNP型] RC8A 安全电路”。
Motion I/O输入的构成
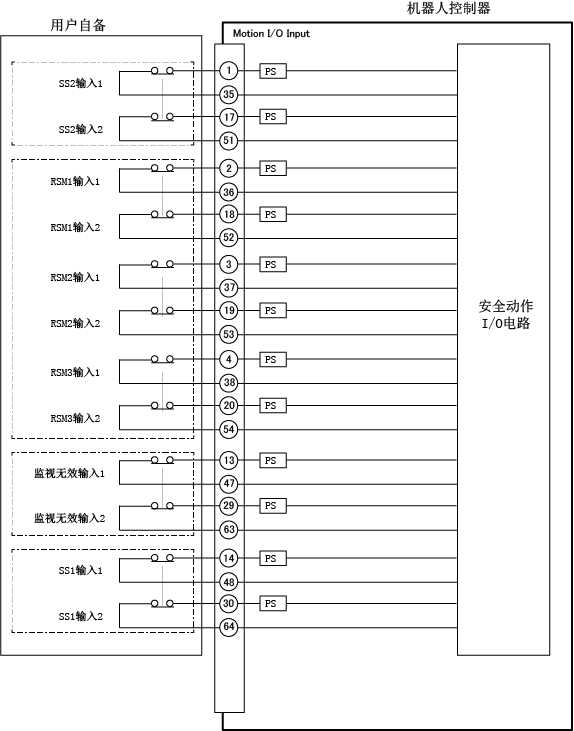
关于安全电路的整体结构,请参照“安全电路(安全动作)”。
接通电机时所需的接线
仅在紧急停止输入、SS1输入的2个系统同时短路时,电机可以为ON状态。
| 信号名称 | 端子编号 |
|---|---|
| 外部紧急停止输入1 | Mini I/O的No.2和36 |
| 外部紧急停止输入2 | Mini I/O的No.3和37 |
| SS1输入1 | Motion I/O Input的No.14和48 |
| SS1输入2 | Motion I/O Input的No.30和64 |
请用各自的接点控制2个外部紧急停止输入,2个SS1输入。采用1个接点的“2电路并联连接”或“1电路常短路”判断为外部电路异常,紧急停止不能解除。
自动运行时所需的接线
短路状态下可将机器人切换至自动模式。
| 信号名称 | 端子编号 |
|---|---|
| 自动允许输入1 | Mini I/O的No.1和35 |
| 自动允许输入2 | Mini I/O的No.31和65 |
| 防护停止输入1 | Mini I/O的No.4和38 |
| 防护停止输入2 | Mini I/O的No.5和39 |
| SS2输入1 | Motion I/O Input的No.1和35 |
| SS2输入2 | Motion I/O Input的No.17和51 |
- 请用各自的连接控制2个自动允许输入和2个防护停止输入。1个接点的“2电路并联连接”和“1电路常短路”判断为外部电路异常时,不能动作。
- 无需进行防护停止时,转移连接至No.4和38、No.5和39,作为常短路使用。
安全功能无效时的接线
自动模式
在自动模式中,在短路状态下将RSM功能设成无效状态。
RPM功能、SLP功能保持有效。
| 信号名称 | 端子编号 |
|---|---|
RSM1输入(系统1) |
Motion I/O Input的No.2和36 |
| RSM1输入(系统2) | Motion I/O Input的No.18和52 |
| RSM2输入(系统1) | Motion I/O Input的No.3和37 |
| RSM2输入(系统2) | Motion I/O Input的No.19和53 |
| RSM3输入(系统1) | Motion I/O Input的No.4和38 |
| RSM3输入(系统2) | Motion I/O Input的No.20和54 |
- 请用各自的连接控制2个RSM输入。1个接点的“2电路并联连接”和“1电路常短路”判断为外部电路异常时,不能动作。
- 如果RSM1~3输入中没有进行任何接线,RSM1输入有效,将机器人动作速度限制成125mm/s,并进行监视。
手动模式
在手动模式中,在短路状态下将SLP功能、RSM功能、RPM功能设成无效状态。
| 信号名称 | 端子编号 |
|---|---|
| 监视无效输入1 | Motion I/O Input的No.13和47 |
| 监视无效输入2 | Motion I/O Input的No.29和63 |
ID : 2478