
ID : 2484
Robot Position Monitoring (RPM)
功能
这是监视机器人上的监视点是否超过指定范围的功能。
如果超过指定范围,SS1功能起作用,停止机器人,断开电机电源。这个功能并不是保证各监视点不出现在监视领域外。
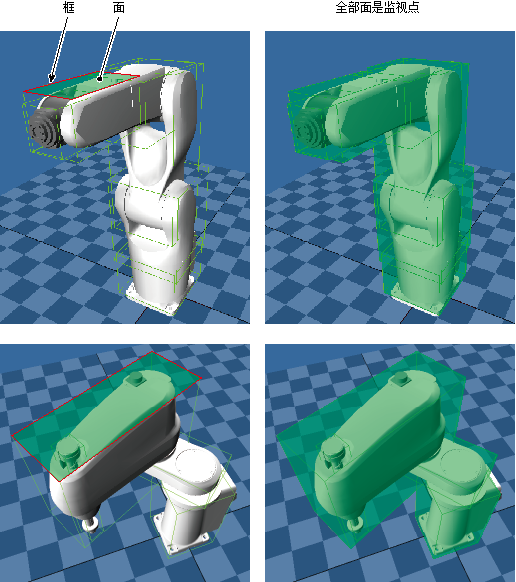
监视点为以下位置。
- 用围起机器人臂的框形成的面
限制领域有下表2种。
| 领域 | 内容 |
|---|---|
| 常时限制领域 | 始终监视机器人是否在领域内。 |
| 暂时限制领域 | 可通过指定“监视领域*无效输入”,切换监视或不监视。 |
使用条件
| 输入信号 | 监视无效输入(仅手动模式有效)、工具编号输入*、监视领域*无效输入 |
|---|---|
| 输出信号 | RPM输出 |
| 监视对象 | 机器人轴,附加轴 |
| 监视范围设定 | 常时限制领域:必须由用户设定。设定成围住机器人 暂时限制领域:由用户任意设定 |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 执行模式 | 自动模式、手动模式 |
| 功能的开始时机 |
|
注1:使用监视无效输入时,需要将安全参数中的“15:监视无效输入设定”设成“1:有效”。详细内容请参照“监视无效输入”。
使用方法
工具编号的指定方法
使用Motion I/O输入中的“工具编号输入*”指定工具编号。在这种情况下,将“工具编号输入*”中的4个视为2进制,指定1个工具编号。
例:指定TOOL1时,将“工具编号输入0”设成ON,将“工具编号输入1”~“工具编号输入3”设成OFF。
暂时限制领域的指定方法
可以通过Motion I/O输入中的“监视领域*无效输入”,按暂时限制领域指定监视/不监视。
在“监视领域*无效输入”为ON的监视领域内不监视。如果关闭,就会监视。
通过WINCAPSIII进行仿真
可以在WINCAPSIII上启动机器人程序,确认监视点是否会进入RPM的监视区域。
由于在机器人的每个控制周期进行干涉检查,机器人动作的显示速度变慢。
该功能在Ver.2.7.*以后的控制器上有效。
使用设定了监视区域的项目进行仿真。
进行仿真时,需要WINCAPSIII满足以下条件。
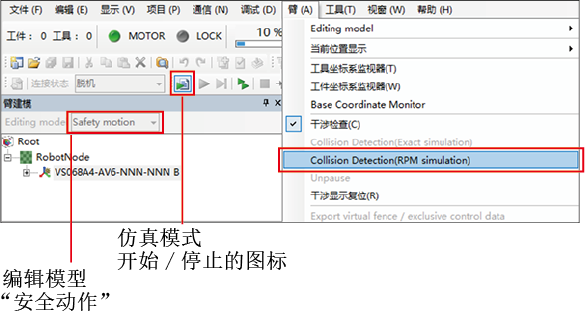
- 在编辑模型为“安全动作”的状态下执行仿真模式。
操作路径 : [“机械臂”菜单] - [干涉检查(RPM仿真)]
在勾选了干涉检查(RPM仿真)的状态下执行程序。在程序正在执行中,RPM功能检测到干涉后,会发出错误通知。
注意事项
- 机器人安装在附加轴上时,机器人的位置就是附加轴移动部分,移动的位置。
-
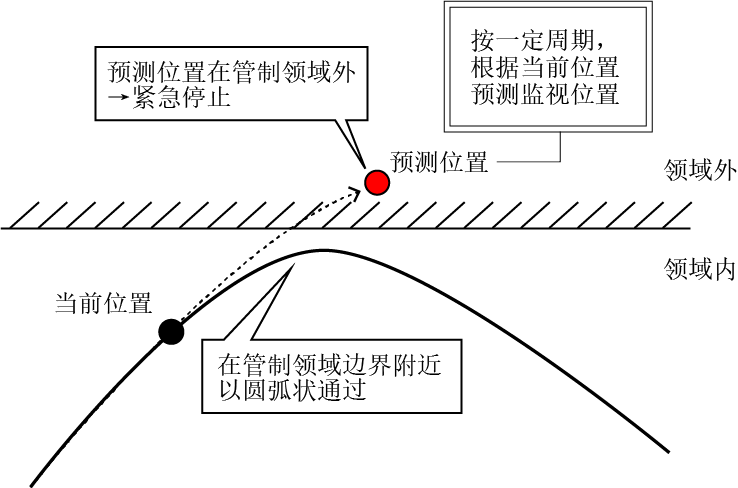
使其通过限制领域的边界附近时,可能出错。出错时,有以下的回避方法:
- 通过限制领域的边界附近时,使其从现在的路径朝离开限制领域的边界的地方通过(调节当前位置、目标位置、动作方法等)。
- 降低通过限制领域的边界附近时的速度。
ID : 2484