
ID : 2482
Safely-Limited Position (SLP)
功能
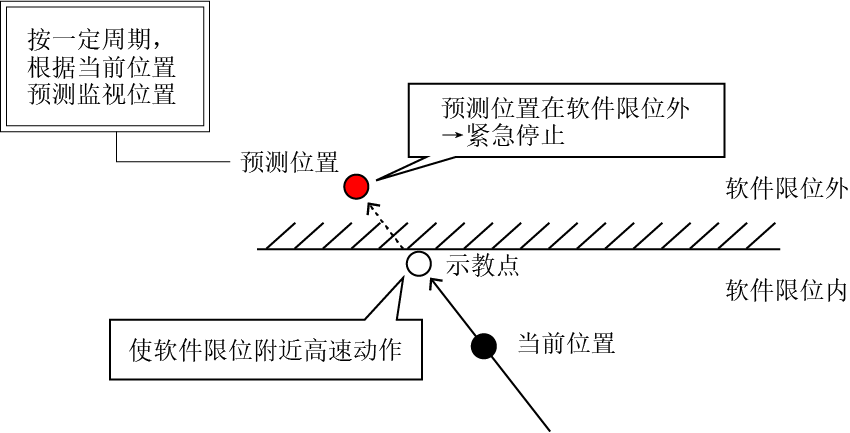
监视各轴是否超过软件限位的功能。
根据各轴的编码器值计算出最大停止位置(直动轴时)或最大停止角度(旋转轴时),监视该值是否在软件限位范围内。如果超出范围,SS1功能工作,停止机器人,关闭电机电源。
使用条件
| 输入信号 | 监视无效输入 |
|---|---|
| 输出信号 | SLP输出 |
| 监视对象 | 机器人各轴、附加轴(注1) |
| 监视范围设定 | 监视对象的各轴角度/位置范围 |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 100ms |
| 执行模式 | 自动模式、手动模式 |
| 功能的开始时机 |
|
注1:默认包括附加轴在内全部轴有效。每个轴设定有效/无效时,需要变更安全参数的“66:SLP设定”。详细内容请参照“安全”。
注2:使用监视无效输入时,需要将安全参数中的“15:监视无效输入设定”设成“1:有效”。详细内容请参照“监视无效输入”。
注意事项
在软件限位附近使其高速动作时,可能出错。
发生错误时,有以下的回避方法:
- 将示教点朝软件限位内侧方向错开。
- 降低通过示教点时的速度。
ID : 2482