
ID : 1144
力感应器的参数设定和通信设定
力感应器中存储着与力感应器自身的功能有关的参数。
要执行利用力感应器的力量控制功能,需要预先设定其参数。
此外,要通过以太网通信,需要设定IP地址。
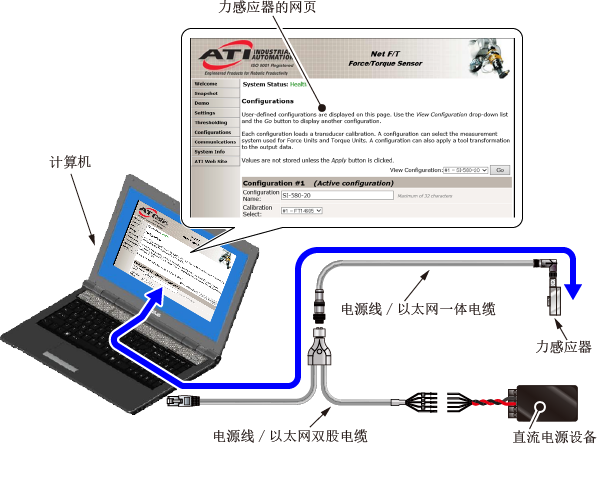
力感应器的参数及通信设定的编辑在计算机上进行。
从计算机上通过以太网通信访问力感应器后,计算机上即显示力感应器生成的网页。在该网页上编辑参数。
下图是参数编辑时的系统示例。
按以下步骤进行设定。
|
项目 (链接) |
步骤内容 (链接) |
|---|---|
| 1. 计算机的以太网连接设定 |
为使力感应器和计算机能够通过以太网通信,进行计算机的以太网连接设定。 详细内容请参照计算机的以太网连接设定。 |
| 2. 参数设定和通信设定 |
从计算机的网页浏览器上访问力感应器,进行参数设定和通信设定。 详细内容请参照参数设定和通信设定。 |
| 3. 机器人控制器的通信设定 |
为使机器人控制器和力感应器能够通过以太网通信,进行机器人控制器的通信设定。 详细内容请参照机器人控制器的通信设定。 |
ID : 1144
- 本页相关信息
- 计算机的以太网连接设定
- 参数设定和通信设定
- 机器人控制器的通信设定