
ID : 7195
机器人位置示教与测点数据示教的联动
按照以下步骤实施。
联动步骤
1
通过远程TP或虚拟TP按下记路径开启变量画面。
操作路径:基本画面 - [F3 变量]
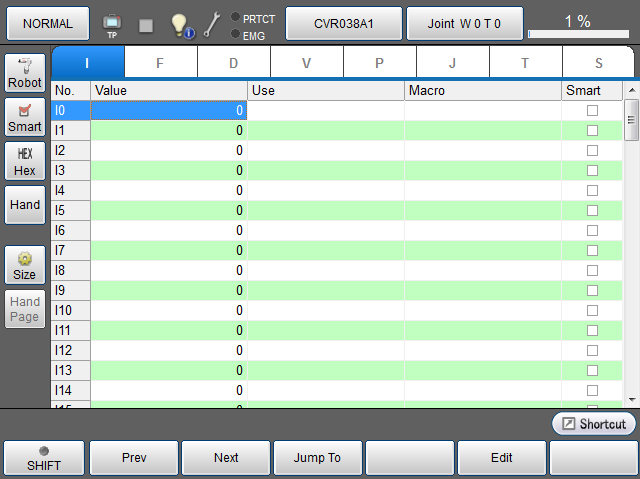
夹治具被激活时,变量画面的左侧将显示[夹治具]按钮。
要获取夹治具测点数据时,按下[夹治具]按钮。
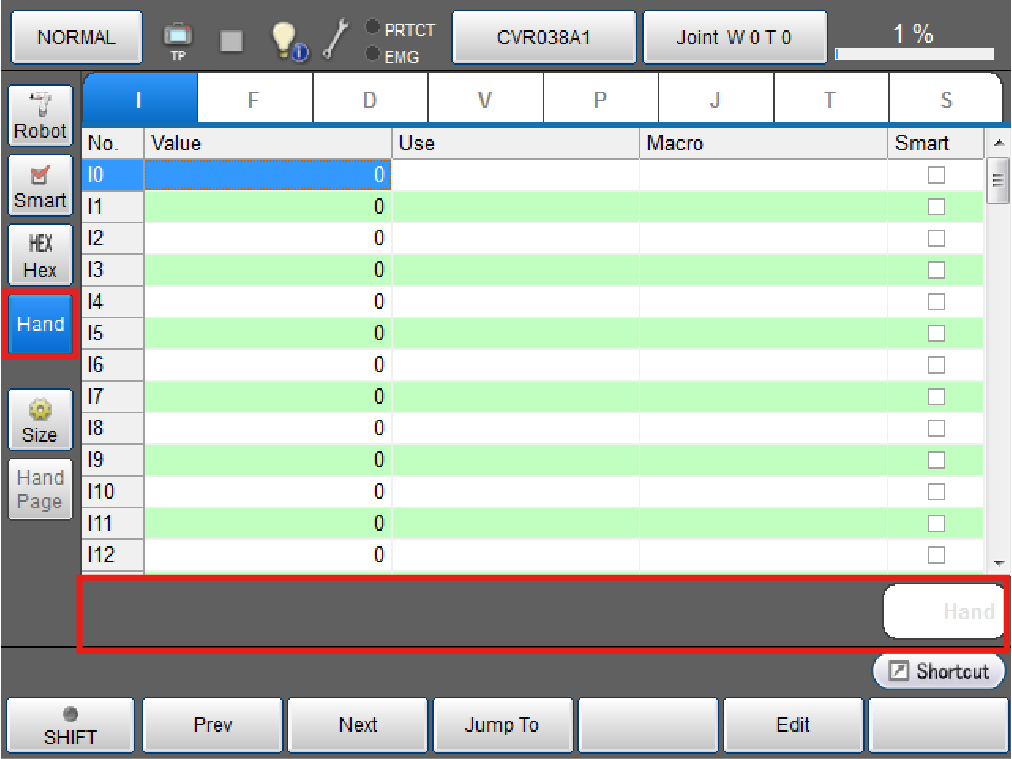
实现与夹治具联动的[Hand]按钮将显示在画面下方。
2
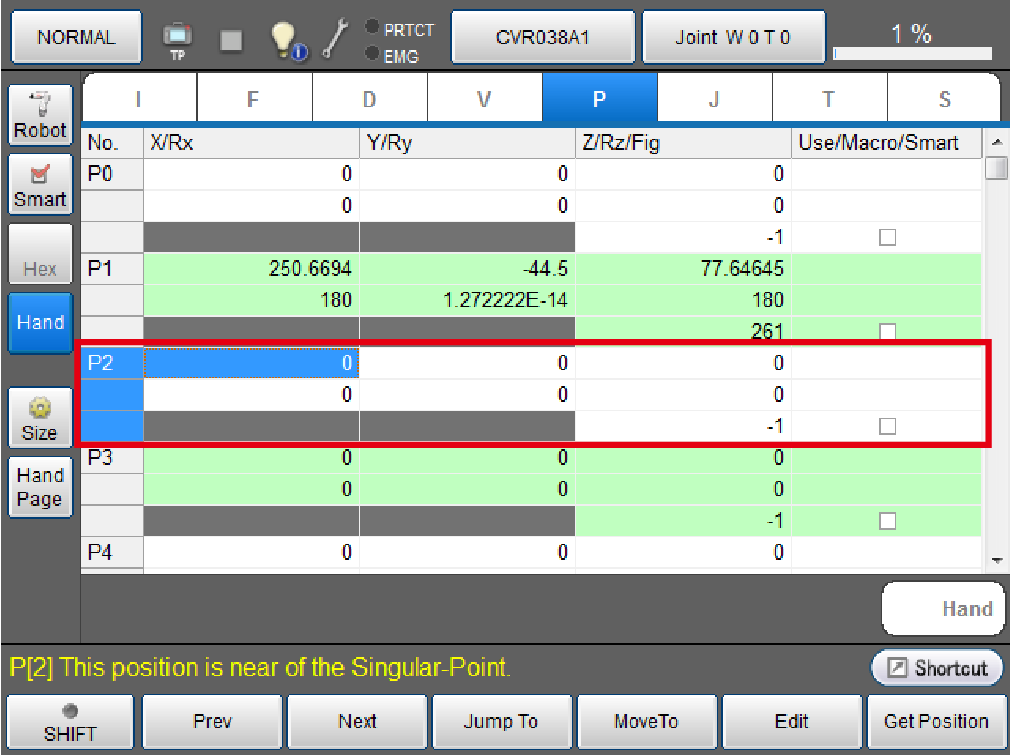
切换为示教机器人位置的变量选项卡,选择变量编号。
位置示教可以是P型、J型、T型变量。
可按下变量编号的数据部分进行选择,颜色会变为蓝色。
关于详细内容请参照TP也有应用程序操作指南的“变量画面的显示、变更”。
3
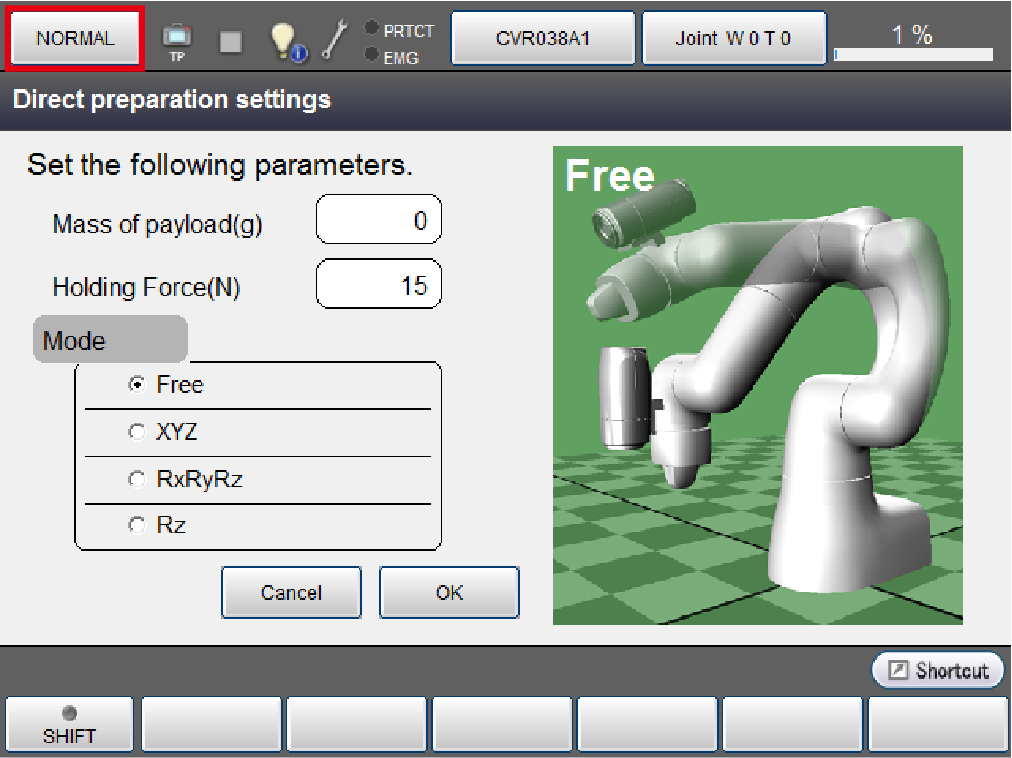
按下已经显示为“NORMAL”的按钮。
直接模式的设定画面已经打开,请直接设定项目,按下[OK]按钮。
关于直接模式操作的详细内容请参照TP应用程序操作指南的“直接教导”。
4
用手移动COBOTTA本体,并使之成为所示教的位置・姿势。
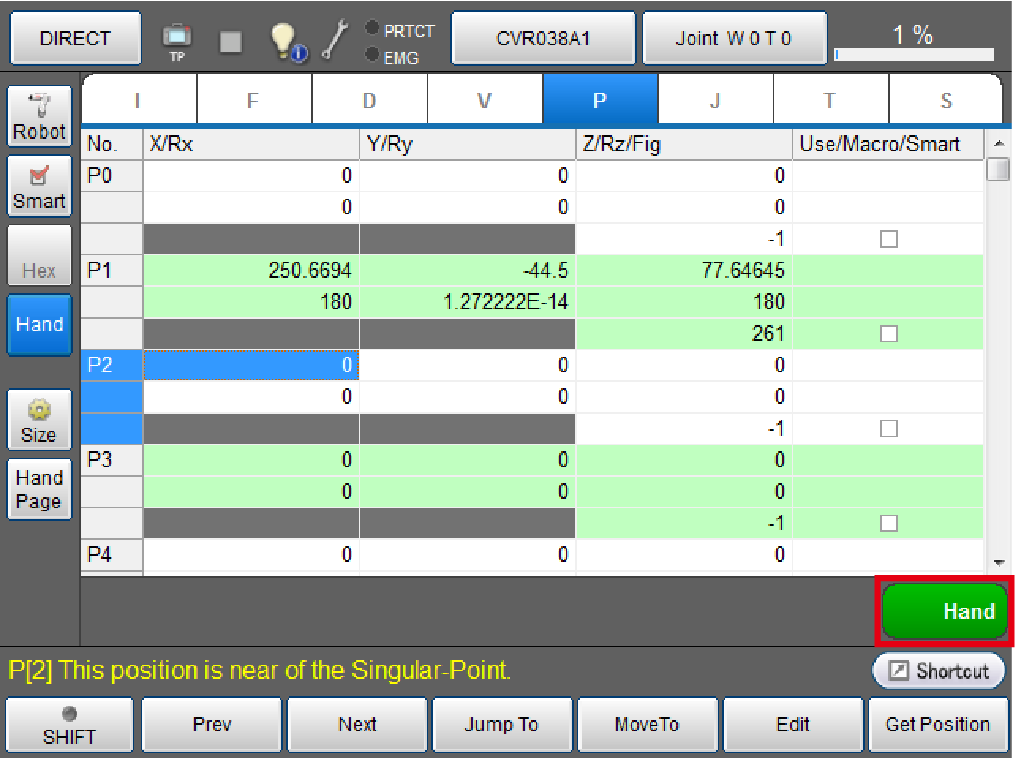
5
通过该位置、姿势设定夹治具测点时,需按下[Hand]按钮。
按钮变为绿色之后,即为联动状态。
6
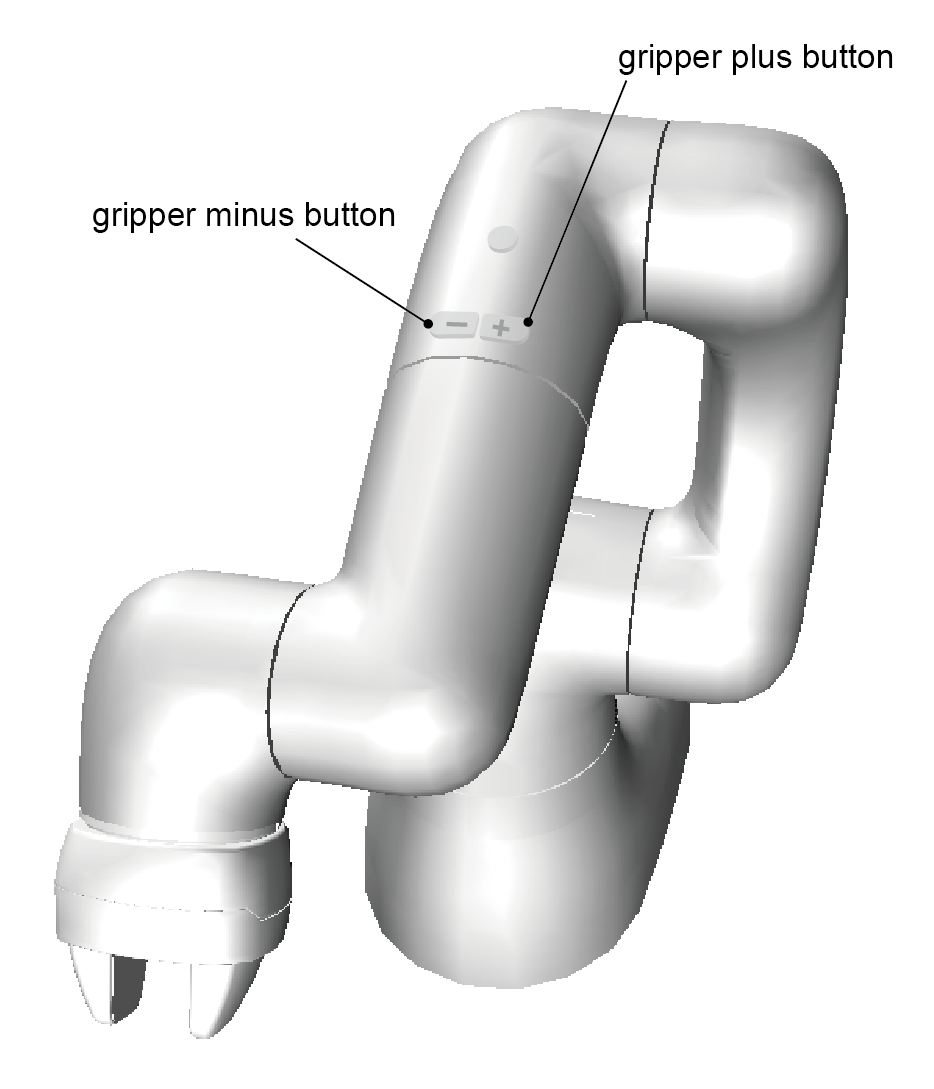
按下COBOTTA机械臂上的夹治具开闭开关,来决定手指的位置。
在按下机械臂上的夹治具开闭开关时,就能实现手指的动作。
使用机械臂上的夹治具开闭开关时,需要通过“COBOTTA参数工具”设定。
详细内容请参照“COBOTTA参数指南”。
根据此时的动作,之后获取时,就能自动进行夹治具的模式设定。
使用实际工件进行工件夹持的示教。
| 操作 | 在获取时的夹治具的模式 |
|---|---|
| 关闭夹治具进行工件的夹持。 | 恒速移动夹持(闭)模式。 通过HandChuck指令来使用。 |
| 打开夹治具进行工件的夹持。 | 恒速移动夹持(开)模式。 通过HandChuck指令来使用。 |
进行夹治具的开闭,但不夹持工件。 |
绝对位置动作模式 获取当前手指的位置。 通过HandUnChuck指令来使用。 |
7
完成夹治具动作指定之后,可以按下COBOTTA的机械臂上的功能键,或者按下变量画面的[F6 位置获取]按钮。
机器人的位置信息与测点数据被获取。此时的变量编号与测点编号相同。
夹治具信息的获取数据将包含模式、移动量、速度、夹持力。该模式将从Step6的夹治具动作开始自动确定。
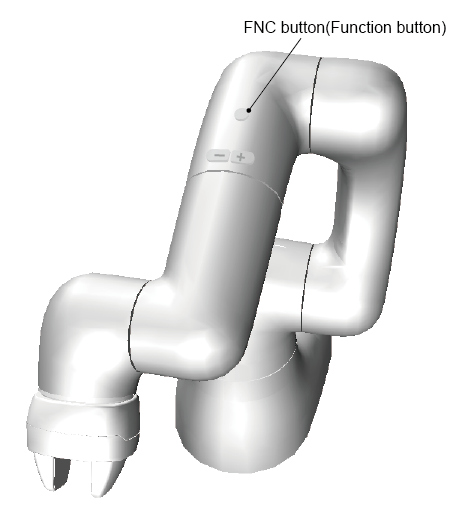
当按下COBOTTA的机械臂上的功能键后,机器人的位置信息与夹治具的测点数据将被立即获取。
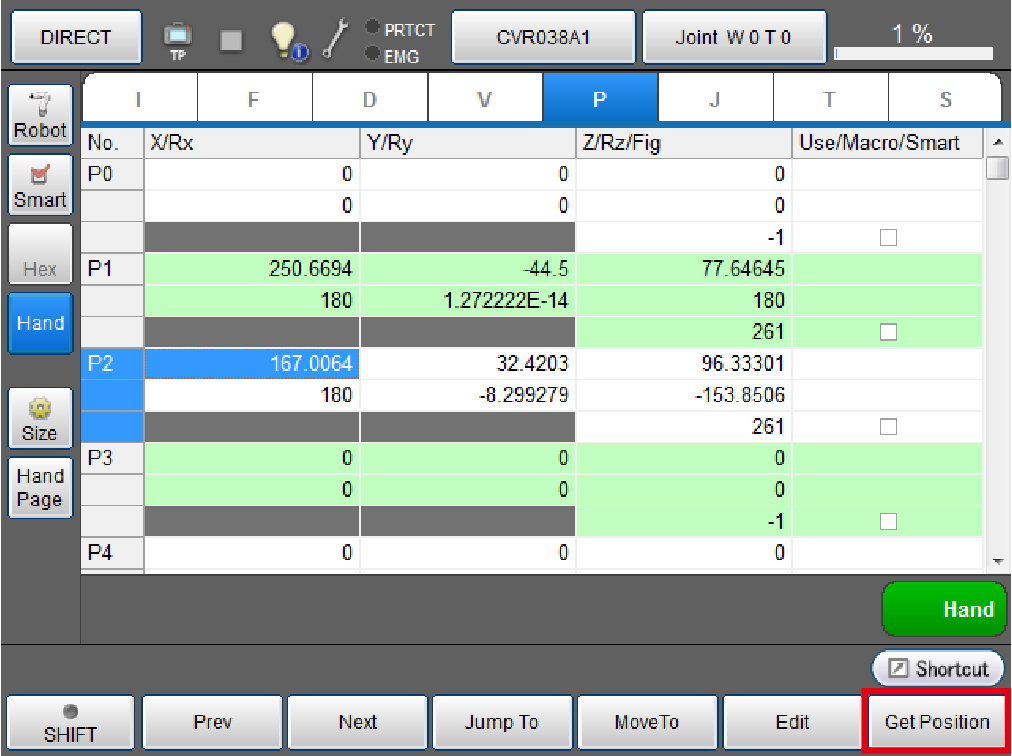
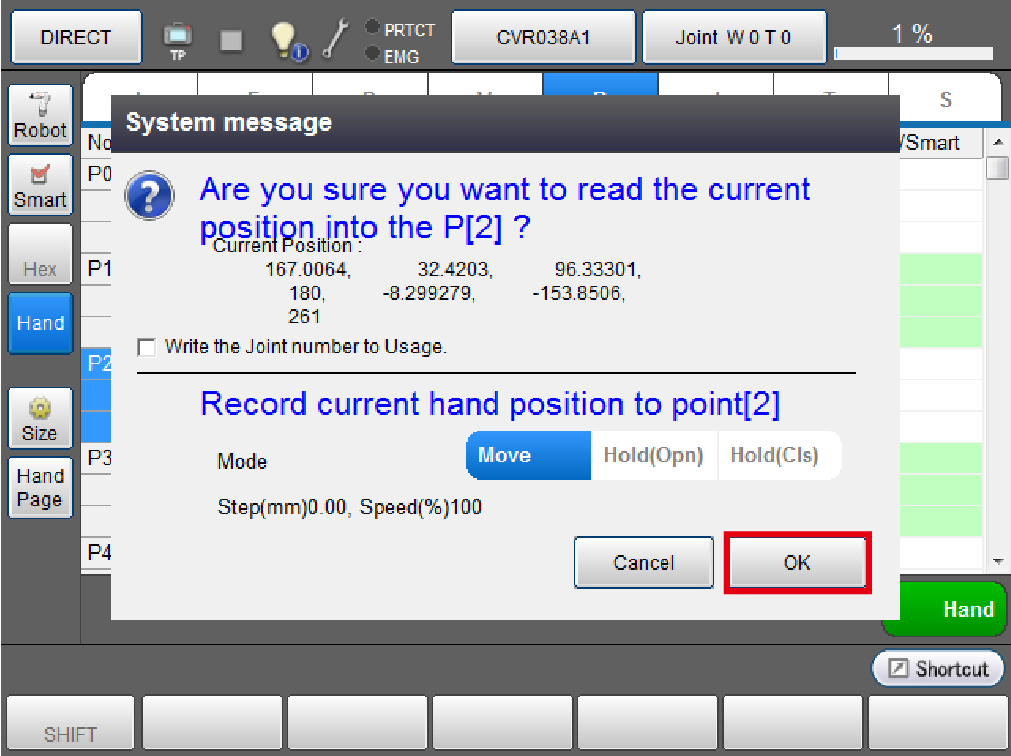
按下变量画面的[F6 位置位置获取]按钮后,将会有新窗口被打开,机器人位置信息显示于上方,夹治具的测点信息将显示于下方。
按下[OK]键后,机器人的位置信息与夹治具的测点数据将被获取。
8
其他机器人的位置和夹治具测点数据也可同样按照Step3~Step7的步骤进行示教。
如无需获取测点数据时,可按下Step4的[Hand]按钮,解除联动之后,不执行Step5~Step6、直接进行Step7的机器人“F6 位置获取”。
如在联动解除状态下按[Hand]按钮,将会进入到联动状态,但当在联动状态下按该按钮,则会解除联动状态。
9
希望变更夹治具模式时,请按下“夹治具画面”按钮。
夹治具画面已经打开时,可选择测点编号来变更模式。
关于夹治具画面的操作方法请参照“夹治具画面的使用方法”。
本操作可根据实际需要执行。
确认步骤
所获取测点数据的确认可与机器人位置数据确认联动起来进行操作。
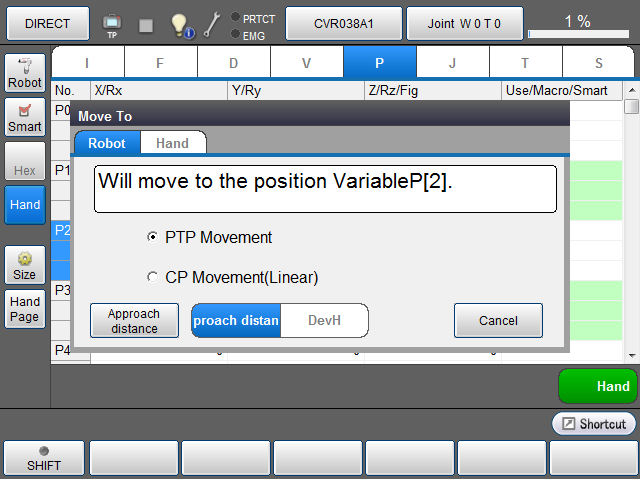
在变量画面中指定变量,按下[Hand]按钮转为联动状态后,再按下“F4 移动”。
Robot与Hand选项卡将在下记画面中显示。(变量的No与夹治具的变量No联动)
进行变量移动后,执行机器人动作,待动作结束后,将开始夹治具变量移动。
ID : 7195