
ID : 7160
夹治具画面的使用方法
确认夹治具的状态,手动开闭夹治具,设定测点数据要在远程TP或者虚拟TP的夹治具画面进行。
此处就夹治具画面的使用方法进行说明。
夹治具画面的启动
从远程TP或者虚拟TP 的顶端画面选择[F9 夹治具],或者从快捷键选择[夹治具]。启动夹治具画面
夹治具画面的构成
夹治具画面由(1)夹治具状态显示、(2)手动动作、(3)测点数据显示,这3部分构成。
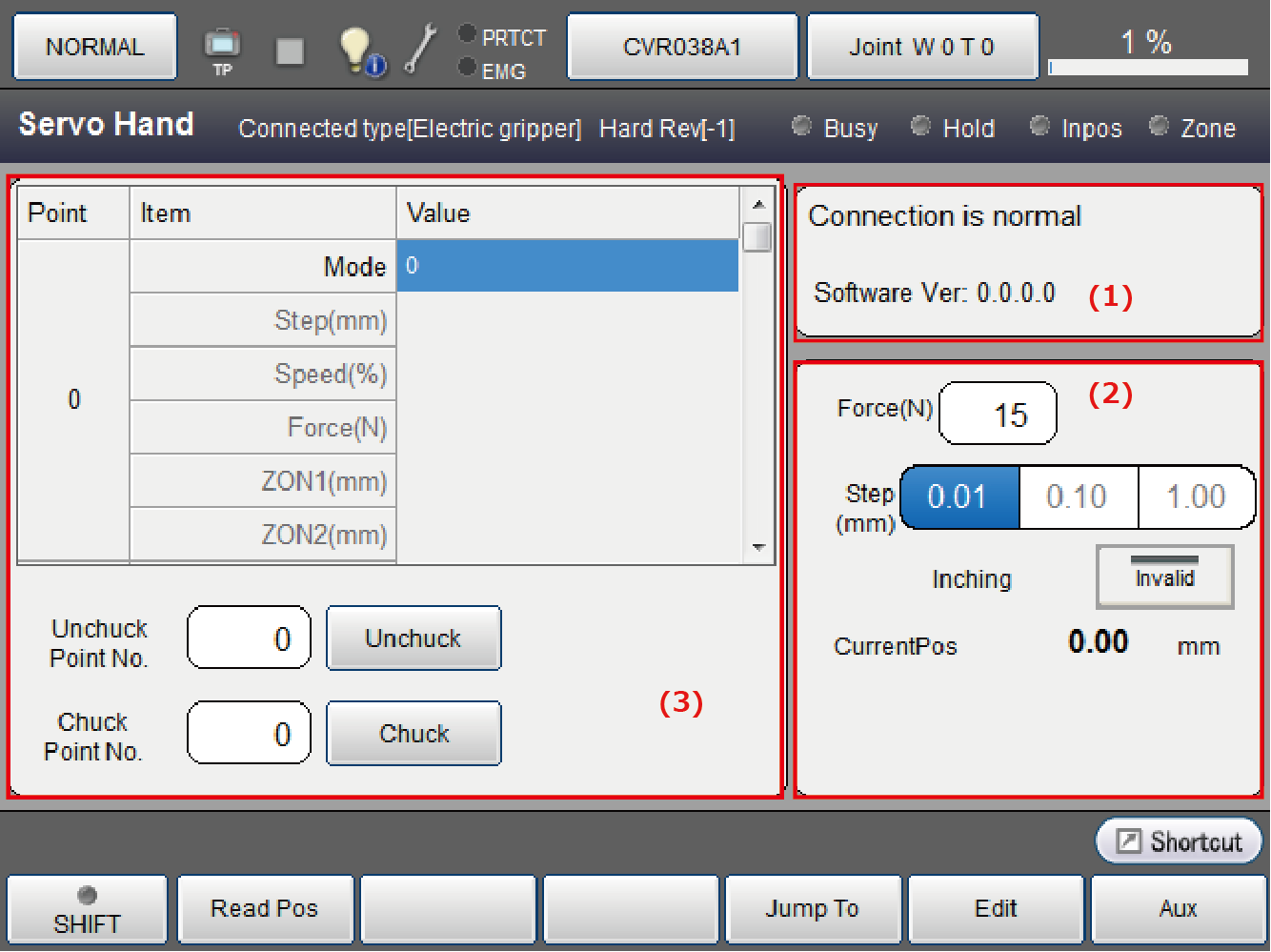
(1)夹治具的状态显示
夹治具的状态显示区将显示夹治具动作状态、连接状态,软件版本。显示状态的种类如下所示。
| Busy |
表示动作状态。 亮灯:动作中、熄灭:可接受指令 |
|---|---|
| Hold |
表示夹持状态。 亮灯:夹持中、熄灭:释放 |
| Inpos | 显示夹治具动作结束时的位置是否已经到达目标位置。 亮灯:已到达、熄灭:未到达 |
| Zone | 当夹治具动作结束时的位置处在Zone范围内时为ON。 亮灯:范围内、熄灭:范围外 |
| 连接状态 | 表示夹治具的连接状态。有以下3种。 |
| 软件版本 | 显示夹治具的软件版本。 |
(2) 手动动作
按压远程TP/虚拟TP的手动操作按钮,则夹治具动作。进行手动动作时可设定的值如下所示。在通过COBOTTA本体的夹治具+按钮/夹治具-按钮动作时也使用该设定值。
通过手动操作按钮操作夹治具时,请同时按下动作许可按钮。
| 夹持力(N) (*1) |
在手动动作状态夹持工件时,设定所发挥的夹持力。 单位为[N]。最大夹持力为20N。 |
|---|---|
| 微动动作 | 切换微动动作的有效/无效。 在此画面上将微动动作设为有效后,也可通过机械臂上的夹治具+按钮/夹治具-按钮操作进行微动。 |
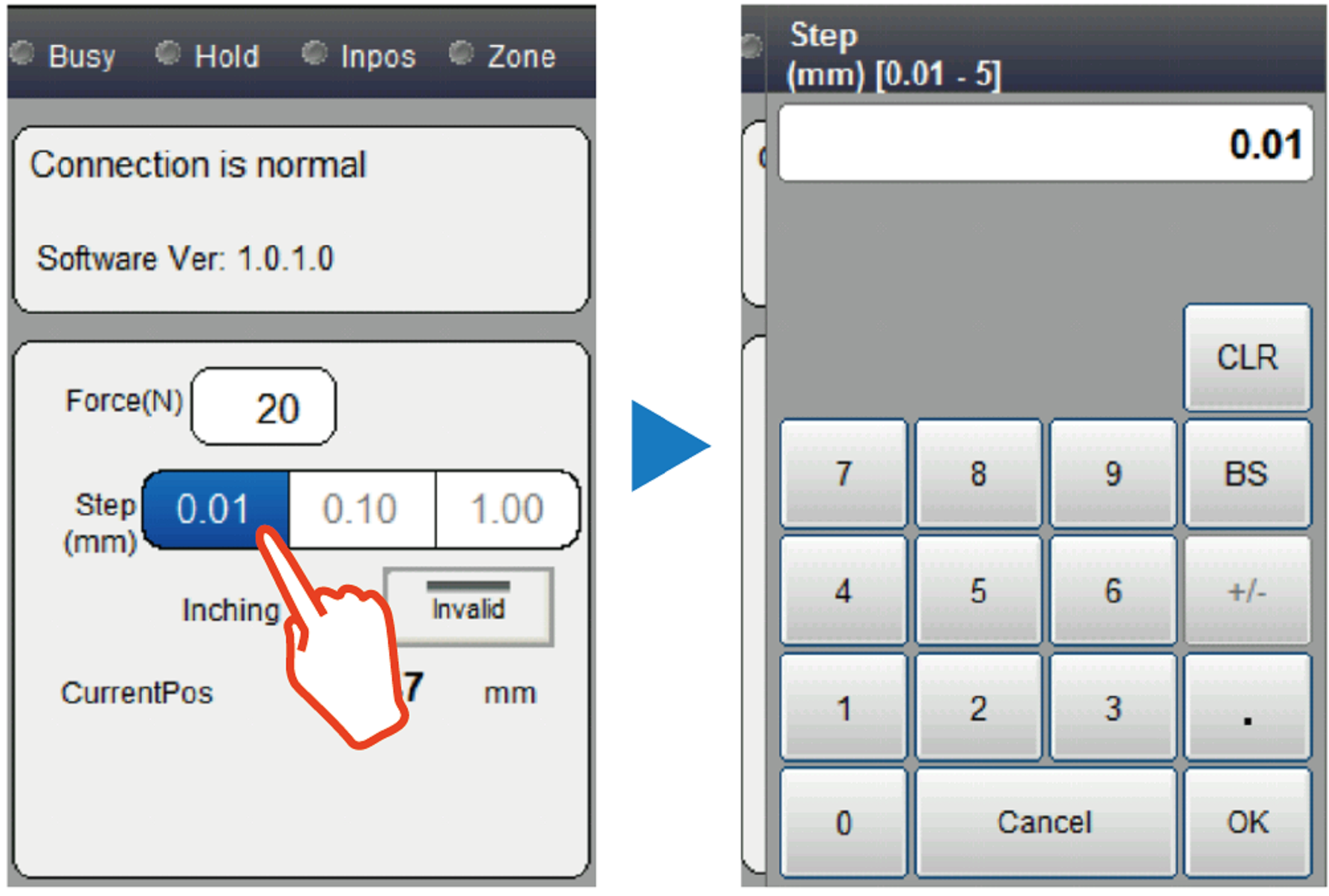
| 微动距离(mm) | 设定微动动作生效时的动作距离。单位为[mm]。 编辑微动距离时,按下选中的按键后会显示数字键并可设定值。设定可能的范围是0.01mm ~ 5.00mm。 |
(*1) 只有夹持力(N)的设置值能够不受电源启动关闭的影响,被一直保存。
(3)测点数据显示
可对夹治具动作指令HandUnChuck、HandChuck所使用的测点数据进行设定。
测点数据的内容请参照“HandUnChuck”、“HandChuck”指令。
[松开动作]按钮与[夹紧动作]按钮用来确认所设测点数据的动作。
通过[松开动作]按钮和[卡盘动作]按钮执行动作时,请同时按下OK按钮和动作许可按钮。如果释放按钮,则COBOTTA停止。
F1 : 位置获取
获取测点数据当前信息。
| 模式 | 电动夹治具的动作模式。将根据按下位置获取按钮前的夹治具动作状态,自动确定模式。
|
|---|---|
| 移动量(mm) | 设定夹治具当前手指的位置。单位为[mm]。 |
| 速度(%) | 夹治具的动作速度。全部都设定为100%。单位为(%)。 |
| 夹持力(N) | 设定手动动作状态的夹持力。单位为[N]。 |
在按下位置获取按钮时,无论任何种类的动作模式,移动量、速度、夹持力的所有信息都将被获取到测点数据中。
F4: 转移
所指定的测点编号数据将显示在测点画面上。
F5:编辑
编辑测点画面上有光标停留的项目。
F6:复制
复制当前所选测点内容。
F7: 粘贴
复制选择了F6复制内容的测点信息。
ID : 7160