
ID : 7291
起動時の動作準備
COBOTTAの電源を投入後は、まだ、ロボットプログラムを実行できる状態ではありません。動作準備を実施することが必要です。
また、ロボットの動作をより正確するために、任意でCALSETを実施してください。
各項目は、それぞれ、下記3つの方法で実施可能です。
| 実施項目 | 操作方法 |
|---|---|
|
1. CALSET(任意) |
|
|
2. 動作準備 |
ここでは、各操作方法について、下記項目に分けて説明します。
事前に設定しておくパラメータ
TPアプリによる操作では、COBOTTAの電源投入後、自動的に表示される、CALSETを実施するウィンドウの内容に沿って操作します。
TPアプリによる操作以外の方法で実施する場合は、CALSETを実施するウィンドウが表示しないように設定しておく必要があります。
(上記設定が可能なCOBOTTAのソフトウェアバージョンは2.6.*以上です。)
ウィンドウ表示の設定は、TPアプリで、下記ウィンドウで行います。
操作経路 : [F2 アーム] - [F6 補助機能] - [F1 使用条件]
下図のような [使用条件] ウィンドウが表示されます。
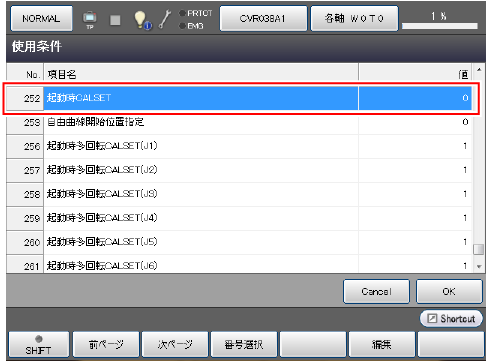
| 設定パラメータ | 値 |
|---|---|
| 252 : 起動時CALSET |
COBOTTA起動時のCALSET実施ウィンドウの表示有無
|
パラメータを、"表示されない" 設定にしてください。
逆に、TPアプリによる操作を実施する場合は、上記パラメータを "表示される" 設定にしてください。
各操作方法の説明
操作方法は、下記の3種類がありますが、複数の操作方法を組合せないようにしてください。
例えば、CALSETをTPアプリで行う場合、動作準備をI/Oコマンドやロボットプログラムで行わず、TPアプリで行ってください。
TPアプリによる操作
下記参照先をご覧ください。
| 実施項目 | 参照先 |
|---|---|
| 1. CALSET(任意) |
CALSETでは、COBOTTAを動作させます。詳細は、"起動時のCALSET" を参照してください。 |
| 2. 動作準備 | "動作準備" を参照してください。 |
I/Oコマンドによる操作
I/Oコマンドの内容は、フィールドネットワークインターフェースモジュールの使用状況によって異なります。
この機能の使用可能なCOBOTTAのソフトウェアバージョンは2.6.*以上です。
| 実施項目 | 内容 |
|---|---|
| 1. CALSET(任意) |
CALSETでは、COBOTTAをCALSET位置(各軸のメカエンド)に動作させます。CALSETの動作に関しては "起動時のCALSET" のTPアプリの画面を参照してください。 I/OコマンドまたはロボットプログラムによるCALSETを"AutoCal"と呼びます。 "AutoCal"のI/Oコマンドについては下記リンクを参照してください。 フィールドネットワークインターフェースモジュールの使用状況別参照先 |
| 2. 動作準備 |
動作準備のI/Oコマンドについては下記リンクを参照してください。 フィールドネットワークインターフェースモジュールの使用状況別参照先 |
- TPアプリを接続している場合、TPアプリには動作準備ウィンドウが表示されます。I/Oコマンドによる、動作準備を実施すると、TPアプリの動作準備ウィンドウは、自動的に閉じます。
- AutoCalは、動作準備の実施後に行うとエラーが発生する可能性があります。詳細は、後述の "I/Oコマンドまたは、ロボットプログラムによる方法での実施タイミングについて" を参照してください。
- CALSET時に、エラー「0x8420436* : *軸:CALSETが実行できません。」が発生する場合があります。エラーが発生した場合は、ブレーキを解除し、各軸をメカエンドに移動させてから、再度CALSETを実行してください。
ロボットプログラムによる方法
この機能の使用可能なCOBOTTAのソフトウェアバージョンは2.6.*以上です。
COBOTTAの電源投入後、動作準備が完了するまでは、通常タスクは実行できません。したがって、下記のPacScriptコマンドは "特権タスク" で実行してください。
また、特権タスクの起動設定を、電源立ち上げ時に起動する設定にすることで、TPアプリがない状態でも、自動的に動作準備状態にすることができます。特権タスクの起動設定については"リモートTP/バーチャルTP操作ガイド"の "特権タスクの起動/停止にかかわる設定" 参照してください。
| 実施項目 | 内容 |
|---|---|
| 1. CALSET(任意) |
CALSETでは、ロボットプログラムにより、COBOTTAをCALSET位置(各軸のメカエンド)に動作させます。CALSETの動作に関しては "起動時のCALSET" のTPアプリの画面を参照してください。 ロボットプログラムまたはI/OコマンドによるCALSETを"AutoCal"と呼びます。"AutoCal"の実施は、PacScriptコマンドの "AutoCal" を使用します。 |
| 2. 動作準備 |
動作準備の実施は、PacScriptコマンドの "MotionPreparation" を使用します。 |
- TPアプリを接続している場合、TPアプリには動作準備ウィンドウが表示されます。ロボットプログラムによる、動作準備を実施すると、TPアプリの動作準備ウィンドウは、自動的に閉じます。
- AutoCalは、動作準備の実施後に行うとエラーが発生する可能性があります。詳細は、後述の "I/Oコマンドまたは、ロボットプログラムによる方法での実施タイミングについて" を参照してください。
- CALSET時に、エラー「0x8420436* : *軸:CALSETが実行できません。」が発生する場合があります。エラーが発生した場合は、ブレーキを解除し、各軸をメカエンドに移動させてから、再度CALSETを実行してください。
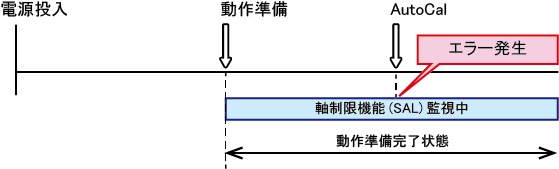
I/Oコマンドまたは、ロボットプログラムによる方法での実施タイミングについて
軸制限機能(SAL)が軸を監視中にAutoCALを実施すると、軸制限機能(SAL)の制限値まで動作した時点でエラーが発生してしまいます。
工場出荷時、軸制限機能(SAL)は機能自体が無効となっていますが、有効に設定すると、動作準備実施後から軸を監視し始めます。
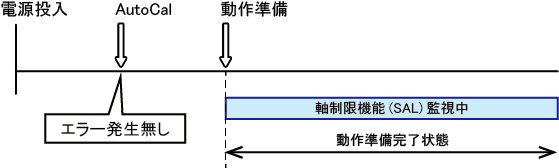
この場合、動作準備実施前にAutoCALを実施することで、エラーの発生を回避できます。
-
動作準備後にAutoCALを実行
-
動作準備前にAutoCALを実行
ID : 7291