
ID : 5230
向指定坐标移动(Move指令)
功能
机器人从当前位置向指定坐标移动。
格式
Move 动作插补,目标位置[,动作选项]必须输入动作插补、目标位置。请根据需要输入动作选项。
动作插补
机器人手臂前端的移动路径不止一条。可组合各轴的运行创建各种路径。也可控制形成直线或圆弧。在此选择到达目标位置前的机械臂运行方法。 从P、L、C、S的4种控制动作中指定一个。
- P:PTP(Point to Point)控制动作
从当前位置向下个点动作时,中间路径交给机器人处理。
将动作时间控制为最短。 - L :CP(Continuous Path)控制动作
直线插补(直线 = Linear)
在当前位置与下个点,使夹治具以一定姿势和速度保持直线动作。 - C :CP(Continuous Path)控制动作
圆弧插补(圆弧=Circle)
机器人前端在连接3个点的圆弧上动作 - S :CP(Continuous Path)控制动作
自由曲线插补
提前指定中途路径点后,将沿各点平滑动作的方法。
目标位置
在目标位置中输入作为移动目标的动作位置的变量名称。必须输入。
可使用变量的位置型(P型)、连接型(J型)、T型(齐次变换型)。另外,变量的构成因机器人的轴数而异。
可输入各坐标值的数值,但实际经常使用变量P○○或变量J○○。
| 变量名 | 变量的构成 | ||||||
|---|---|---|---|---|---|---|---|
| P型 | X | Y | Z | RX | RY | RZ | FIG |
| J型 | J1 | J2 | J3 | J4 | J5 | J6 | |
可在目标位置上附加目标位置选项。
例
'!TITLE "电装机器人程序"
’程序标题(便于理解内容的任意注释)
Sub Main '定义主进程
TakeArm Keep = 0 '获取机械臂控制权
Speed 80 '机械臂移动速度(内部速度)80%
Move P, P1 '通过PTP插补向变量P1移动
Move L, P2 '通过CP插补(直线)向变量P2移动
Move L, P3 '通过CP插补(直线)向变量P3移动
GiveArm '释放机械臂控制权
End Sub '停止程序目标位置选项
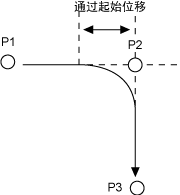
目标位置选项有“通过起始位移”与“目标位置的附加轴选项”。
“通过起始位移”的数值为以指定坐标(姿势)为中心的球的半径,如果动作指令值进入其中,移至下一控制。以mm为单位指定。即,表示动作点的“停止方法”。从一个动作移至下一个动作时,包含以下内容。
关于附加轴选项,请参考程序员手册中的“目标位置的附加轴选项”。
结束动作(@0或省略时)
程序 PRO1.pcs
| 程序 | 动作图 |
|---|---|
Sub Main : : |
 |
| 动作波形图 | |
 |
|
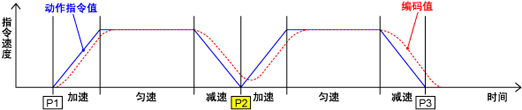
移动至教导的动作位置(P2)后停止的动作称为结束动作。另外,该点称为“End点”。
动作指令值(电机命令波形图)达到P2时,开始向P3移动。
动作指令值和编码器值(表示工具前端当前位置的值)中,电机指令值优先。
受动作指令值与编码器值的时差影响,在P2停止的时间极短。
编码器值确认动作(@E 或 @C)
程序 PRO2.pcs
| 程序 | 动作图 |
|---|---|
Sub Main : : |
|
| 动作波形图 | |
 |
|
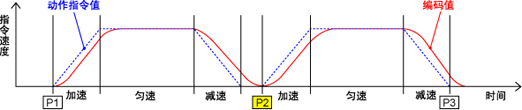
判断编码器值已到达教导的目标位置(P2)称为编码器值确认动作。
优点为机器人切实停止且位置精度较高,但与结束动作相比更加耗时。
@E时
编码器值到达指定角度或脉冲以内时,发出下一指令的命令。
@C时
根据编码器值,在变换坐标的前端位置与姿势到达目标位置(P2)时,发出下一指令的命令。
通过动作(@P)
程序 PRO3.pcs
| 程序 | 动作图 |
|---|---|
Sub Main : : |
 |
| 动作波形图 | |
|
|
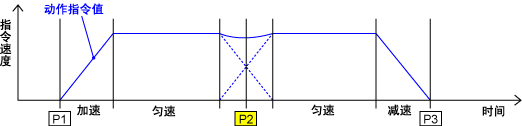
将通过教导的动作位置(P2)附近的动作称为通过动作。另外,该点称为“Pass点”。
指定方法
| 种 类 | 记述方法 | 含义 |
|---|---|---|
| 结束动作 | 省略 | 作为默认值@0处理。 |
| @0 | 电机指令值到达目标位置(指定坐标)时,进入下一动作。为一般结束动作。 | |
| 编码器值 确认动作 |
@E | 编码器值到达目标位置(指定坐标)时,进入下一动作。机器人切实停止。 |
| @C | 条件为满足@E的内容且机器人到达目标位置(指定位置)时为指定姿势。 | |
| 通过动作 | @P | 通过动作目标位置附近(开始位置通过控制器自动设定)。为一般通过动作。 |
| @1~ | 指令值到从目标位置到达指定范围(通过起始位移1㎜~)时,进入下一动作。 范围值仅为通过起始的目标值,并非保证值。 |
动作选项
动作选项仅对执行的Move等动作命令有效,有“速度指定选项”与“Next选项”。
速度指定选项
速度指定选项包括Speed、Accel、Decel、Time。
| 速度指定选项 | 含义 |
|---|---|
| Speed(或标注为S) | 指定内部速度。 同时指定速度指定选项时,请统一指定Speed选项。(Ver.1.8.*或更高版本有效) |
| Accel | 指定内部加速度。 如果变更Accel,Decel也将自动变更。 Decel的值与指定Accel的值相同。 |
| Decel | 指定内部减速度。 |
| Time | 指定动作所需的时间。指定外部速度为100%时移动所需的时间。 |
例
Move L, P1, Speed = 50
'通过CP控制(直线)、内部速度=50%向P1的坐标移动
Move L, P1, Accel=10
'通过CP控制(直线)、内部加速度=10%向P1的坐标移动同时指定“Speed”、“Accel”和“Decel”时,“Speed”会覆盖内部加速度和内部减速度的参数,因此不能一起使用。
想同时指定这些速度指定选项时,请使用Speed选项的统一指定。
Move L, P1, S = ( 20, 10, 100 )
'通过CP控制(直线)、内部速度=20%、内部加速度=10%、内部减速度=100%向P1的坐标移动
Next选项
Next选项是指不等待指定的动作命令的机器人动作完成,使其继续执行下一个命令的选项。
但是,下一个命令无法在机器人动作中执行时,必须等待至能够执行的状态。
机器人动作中无法执行的命令如下所示。
- 不想立即执行下一指令时,通过在带Next选项的动作命令后记述Arrive指令,可指定下一指令的执行时机。
- 处于教导检查模式时,Next选项无效。
例
Move P, P( 400, 300, 300, 180, 0, 180, -1 ), Next
' 开始动作后,将I/O端口编号240设为ON
Set IO[240]其它输入示例
例1
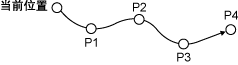
也可在1行中记入连续点的动作。
Move P, P1, P2 P3, P4, Speed = 30上述内容与下述内容相同。
Move P, P1, Speed = 30
Move P, P2, Speed = 30
Move P, P3, Speed = 30
Move P, P4, Speed = 30
“单步”是指P4之前的全部动作。因此,不能在P1与P2等中途点停止。
(单步运行,步骤停止时)
例2
设定各目标位置的目标位置选项。
Move P, @P P1, @P P2, P3, P4, Speed = 30上述内容与下述内容相同。
Move P, @P P1, Speed = 30
Move P, @P P2, Speed = 30
Move P, P3, Speed = 30
Move P, P4, Speed = 30
例3
Move L, P1, Speed = 100
'向P1的坐标(CP控制(直线)、内部速度=100%)移动
Move P, @30 P2, P3, S = 80
'依次向P2(@30)、P3的坐标(PTP控制、内部速度=80%)移动
Move L, @20 P4, @50 P5, @100 P6
'依次向P4(@20)、P5(@50)、P6(@100)的坐标(CP控制(直线))动作
Move L, @P P( 1, 2, 3, 4 )
'通过CP控制(直线)、通过动作按照P1到P4的顺序移动
Move C, P1, @P P2
'通过P1向P2移动的圆弧插补动作。在P2进行通过动作,移至下一控制ID : 5230