
ID : 5231
向Z轴方向移动( Approach,Depart )
当机器人前去夹持工件或者放置工件时,如果任其自由前往目的位置,可能碰撞设备等。为了防止这种情况,先在远处停止,然后从该处朝目的位置直线动作,为此进行控制。
另外,离开目的位置时也一样,直线返回,然后朝下一个目的位置移动。
由于找出该远处的计算十分复杂,为了自动计算,简单控制,准备了Approach指令和Depart指令。
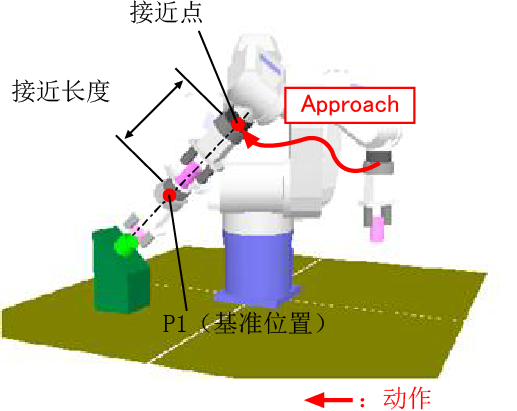
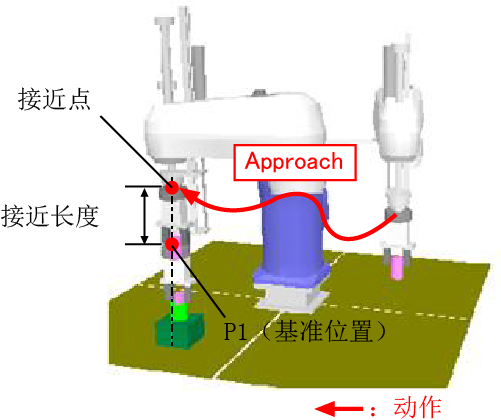
向夹治具方向接近移动(Approach指令)
功能
相对基准位置,朝工具坐标的Z轴方向上指定距离的点(近似点)移动。
格式
Approach 动作插补, 基准位置, 接近长度[, 动作选项]说明
应用示例
Approach P,P1,@P 50
'通过PTP控制,以通过动作,从变量P1向工具坐标的负Z方向的50mm点移动。| 6轴机器人 | 4轴机器人 |
|---|---|
 |
 |
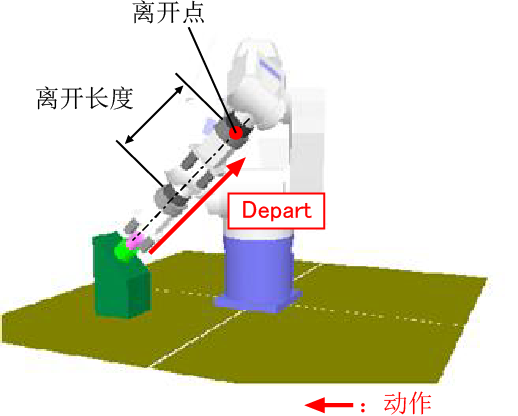
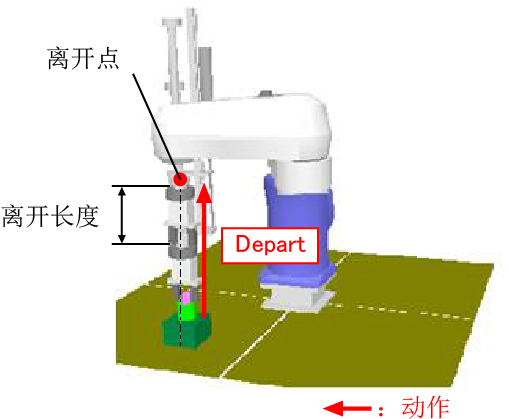
向夹治具方向回避移动(Depart指令)
功能
沿工具坐标的-Z轴方向,只从当前位置向距离指定距离的点(离开点)移动。
主要用于距目标物较远时
格式
Depart 动作插补, 离开长度[, 动作选项]说明
应用示例
Depart L,@P 50
'通过CP控制,以通过动作从变量P1向工具坐标的负Z方向的50mm点移动。| 6轴机器人 | 4轴机器人 |
|---|---|
 |
 |
ID : 5231