
ID : 3352
直接教导
将用手推动机械臂进行教导的方法叫做“直接教导”。
将能够进行直接教导的动作模式叫做“直接模式”。
能够进行直接教导的机型
能够进行直接教导的是下述机器人系列。
但是,以UL规格的机器人不是对象。
- HS、HSA1、HSR
- HM(防尘、防溅规格中可搬运20kg的除外)
- XR
直接教导的步骤
按照以下步骤进行。
使用多功能教导器进行操作。不能用小型教导器操作。
- 进行Z轴平衡调整(仅HM标准机器人)
- 切换为直接模式
- 解除制动器
- 进行直接教导
- 结束直接教导
1.进行Z轴平衡调整
为了防止3轴因重力落下,在3轴(有的机型为3轴和4轴)上设置了制动器。
此制动器在电机OFF时变成锁定状态。为了用手推动机械臂进行移动,需要解除此制动器。如果解除制动器,有时机械臂会落下。
为了防止落下,在HM标准机器人上设置了空气调节器,但是如果气压调整不到位,有时会落下。 为此,在解除制动器前,通过下述路径进行3轴机械臂的平衡调整。
操作路径:[F2 机械臂]-[F6 辅助功能]-[F9 Z平衡]
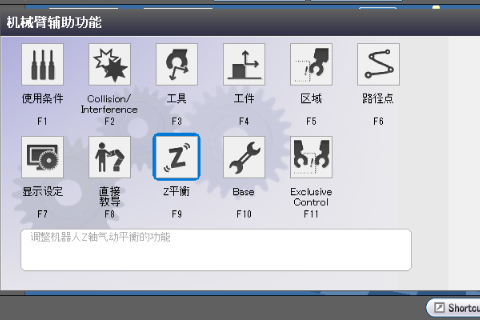
如果按[F9 Z平衡],进入进行Z平衡调整的画面。
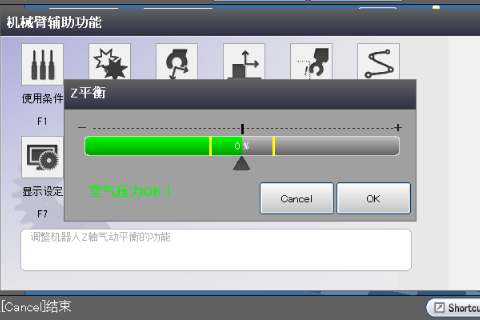
在电机电源ON的状态进行Z平衡调整。
具体的调整步骤请参照操作指南的“Z平衡”。
2.切换为直接模式
操作路径:[F2 机械臂]-[F6 辅助功能]-[F8 直接教导]
如果按[F8 直接教导],显示系统信息,按多功能教导器的[OK]按钮。
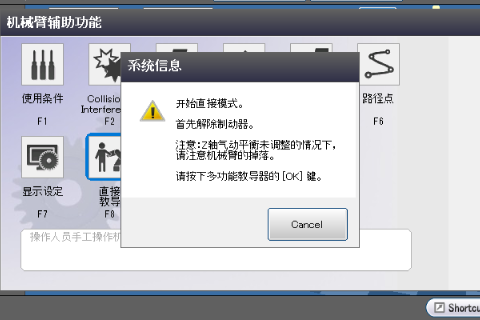
在HM标准机器人上,当气压调整未实施时,显示Z平衡画面,请进行气压调整。
如果切换为直接模式,多功能教导器的动作模式的图标切换。
- 在电机电源ON的状态,不进入直接模式。请事前断开电机电源。
- 在制动器被解除的状态,不进入直接模式。
3.解除制动器
为了进行直接教导,解除制动器。
有使用多功能教导器的方法、使用机器人本体的制动器解除开关的方法。
用多功能教导器解除制动器
操作路径:[F2 机械臂]-[F12 维护]-[F1 制动器]
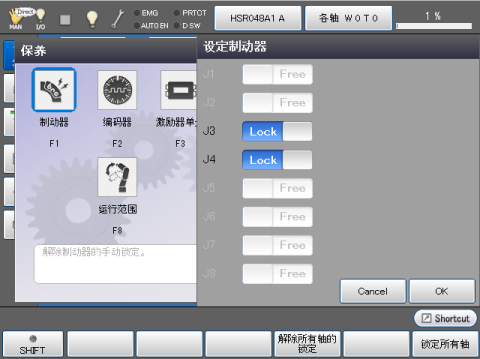
将每个轴切换为“Free”,或者按[F4 解除所有轴的锁定],按[OK]显示系统信息。在该状态按多功能教导器的[OK]。
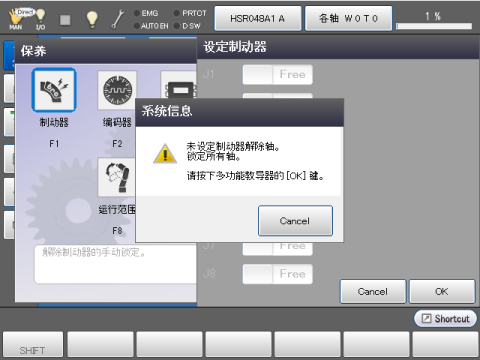
详细内容请参照多功能教导器操作指南的“制动器的设定”。
解除直接模式,或者在进行制动器的锁定操作前保持制动器解除状态。
根据机型的不同,与下述差异。
| 机型 | 附带制动器的轴 | 内容 |
|---|---|---|
| HS | 3轴、4轴 | 需要解除3轴的制动器。如果切换为直接模式,4轴被自动解除制动器。 |
| HSA1、HSR | 3轴、4轴 | 需要解除3轴和4轴的制动器 |
| HM标准 | 3轴 | 如果切换为直接模式,制动器被自动解除,因此不需要此操作 |
| HM防尘、防溅(可搬送10kg) | 3轴、4轴 | 需要解除3轴的制动器。如果切换为直接模式,4轴被自动解除制动器。 |
| XR | 3轴 | 需要解除3轴的制动器 |
用制动器解除开关,解除制动器
按机器人本体上附带的制动器解除开关。制动器只在按住期间被解除。可在下述机型上实施。
制动器解除开关的位置请参照各机器人使用说明书的“紧急停止时,电机OFF的状态下移动各轴”。
4.进行直接教导
用手推动臂进行移动以外的操作与外部教导的情形相同。请参照多功能教导器操作指南的“教导”。
5.结束直接教导
操作路径:[F2 机械臂]-[F6 辅助功能]-[F8 直接教导]
如果按[F8 直接教导],显示系统信息,按[OK]按钮。

被解除的所有制动器自动返回锁定状态。
另外,多功能教导器的动作模式的图标切换。
ID : 3352