
ID : 2454
被夹入、紧急停止时、电机OFF的状态下移动各轴
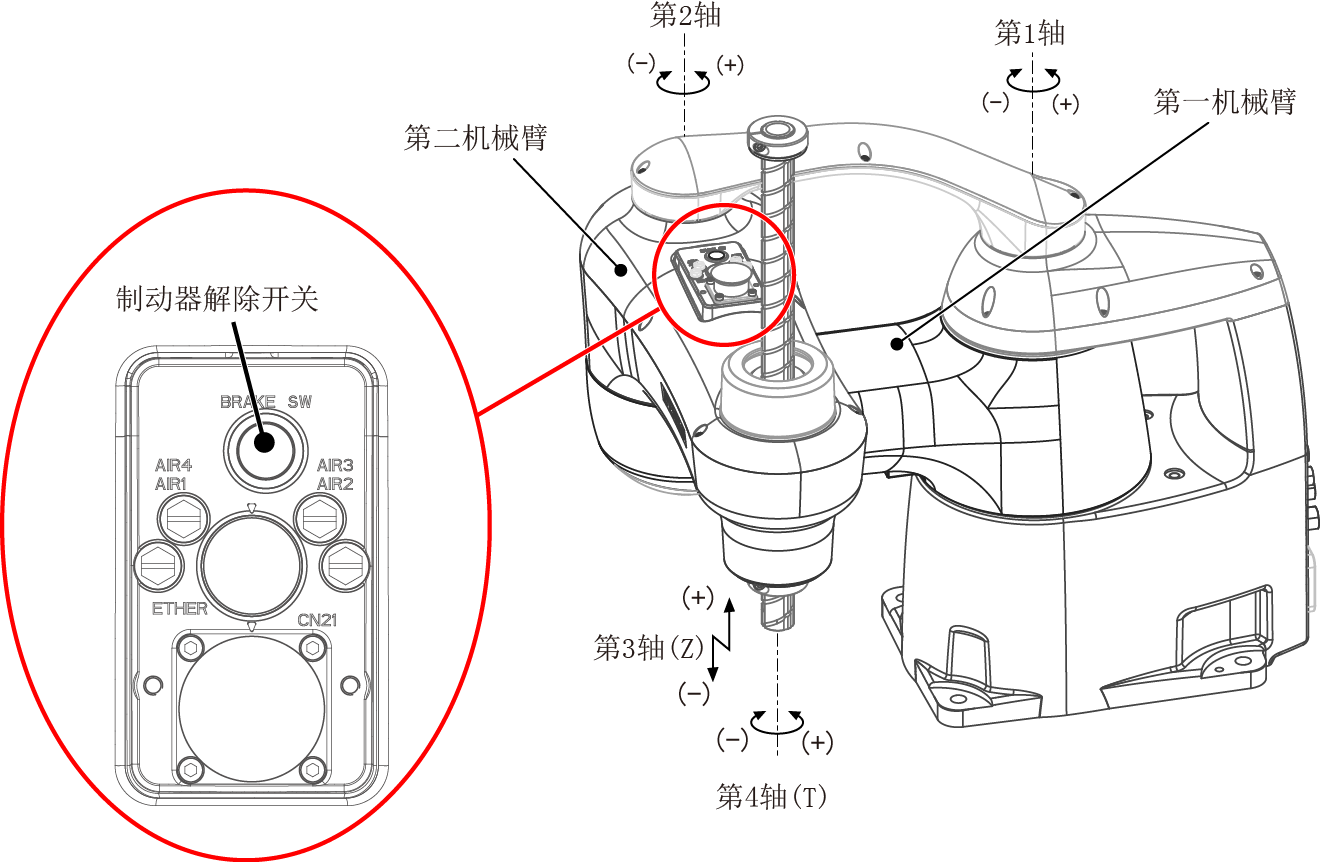
被夹入、紧急停止时、电机OFF状态下移动各轴的方法如下表所示。另外,第3轴(Z)、第4轴(T)带有制动器,因此,需要执行制动器解除操作。
执行制动器解除操作时,Z轴将掉落。在确认不会受伤以及造成设备损伤之后,再进行操作。
紧急停止时各轴的移动方法
| 轴 | 各轴的移动方法 | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 第1轴 |
用手按住机械臂并移动。 |
||||||||
| 第2轴 | |||||||||
| 第3轴(Z轴) |
解除电机的制动器,用手移动轴。 制动器解除有以下的方法。
|
||||||||
| 第4轴(T轴) | |||||||||
|
|
|||||||||
手动运行机器人时,握住塑料外壳以外的部分。
ID : 2454