
ID : 4644
被夹入、紧急停止时、电机OFF的状态下移动各轴
HM系列的制动器解除方法如下表所示。
- 执行制动器解除操作时,Z轴可能落下或上升。在确认不会受伤以及造成设备损伤之后,再进行操作。
- 移动第3轴(Z轴)时,请注意齿条部的锯齿部分,以免切伤手指等。
| 机型 | 带制动器的轴 | 制动器解除方法 |
|---|---|---|
| UL规格以外的机型 | 第3轴(Z) |
“通过多功能教导器/小型教导器操作解除制动器” 注:关于详细的操作方法,请参照操作指南的“机械臂维护功能的显示、设定”。 |
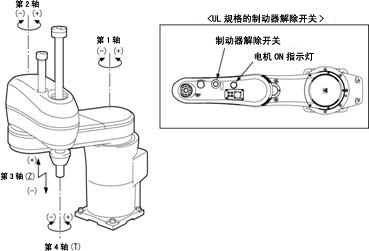
| UL规格 |
第1轴(J1) 第2轴(J2) 第3轴(Z) |
控制器电源ON时,按压制动器解除开关期间,将解除全轴的制动器。 注:UL规格时,无法通过多功能教导器/小型教导器操作解除制动器。 |
紧急停止时各轴的移动方法
被夹入、紧急停止时、电机OFF状态下移动各轴的方法如下表所示。
| 轴 | UL规格以外的机型 | UL规格 |
|---|---|---|
| 第1轴(J1) | 用手按住机械臂并移动。 |
按压制动器解除开关的同时解除全轴的制动器,用手操作相应轴。 |
| 第2轴(J2) | ||
| 第3轴(Z) |
|
|
| 第4轴(T) | 用手旋转轴。 | 用手旋转轴。 |
|
||
手动运行机器人时,握住塑料外壳以外的部分。
ID : 4644