
ID : 4409
通信设定
完成WINCAPSIII和机器人控制器之间的连接后,进行WINCAPSIII的通信设定。
关于机器人控制器侧的设定,请参照多功能教导器操作指南中的“通信设定画面的显示、变更”。
1
从“通信”菜单中选择“通信设定”。
显示选择了“项目属性”对话框的“通信设定”标签的状态的画面。
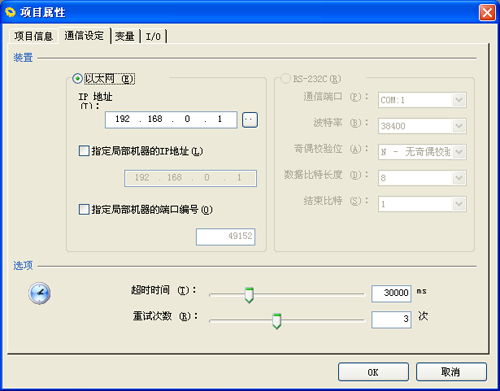
2
进行“装置”设定。
- 以太网连接
指定机械手控制器的IP地址。
关于机器人控制器的IP地址设定,请参照启动手册的“与计算机的连接和传输”。
RS-232C连接功能为RC7M控制器专用功能,因此不能用于RC8系列机器人控制器。
3
设定“选项”。
设定“超时时间”及“重试次数”。
4
单击“OK”按钮。
完成通信设定。
ID : 4409