
ID : 3335
双臂控制功能特有的内容
在此针对双臂控制功能特有的内容,分下述项目进行说明。
| PacScript指令 | 机器人动作指令使用时的机器人指定 |
|---|---|
| “MC8系列控制机器人 × 2 仅内部轴”的组合的轴编号 | |
| 通过多功能教导器进行操作/设定 | 错误显示和错误LOG画面 |
| 简单设定的显示 | |
| 附加轴的操作方法 | |
| 排他功能/协调功能的设定 | |
| 机器人无效设定 | |
| 双臂控制功能无效设定 | |
| EMU | Robot0和Robot1的3D视图显示 |
EMU是可模拟多台电装机器人的软件选项(有偿)。
PacScript的指令
-
机器人动作指令使用时的机器人指定
-
使用机器人动作指令时,需要指定是针对Robot0和Robot1的哪一个的指令。
指定方法是在机器人动作指令前附上机器人名称。
例如,想对Robot0执行Move指令时,记述如下:
Robot0.Move P, @[0] P[0]这一思路与使用协调功能时也相同。有关指定Move指令以外的机器人的指令,请参照位于“协调功能指南”的“指令”内的“指定机器人使用的指令”。
另外,也有对所有机器人执行的指令。请参照位于“协调功能指南”的“指令”内的“以所有机器人为对象的指令”。但是,对于SysState指令,与参照位置的内容不同,规格与独立使用机器人时相同。
“MC8系列控制机器人 × 2 仅内部轴”的组合的轴编号
-
在该组合中,Robot1的轴编号与实际接在MC8系列动作控制器(下称MC8系列)上的电机连接器的轴编号不同。例如,分析下图所示的构成。
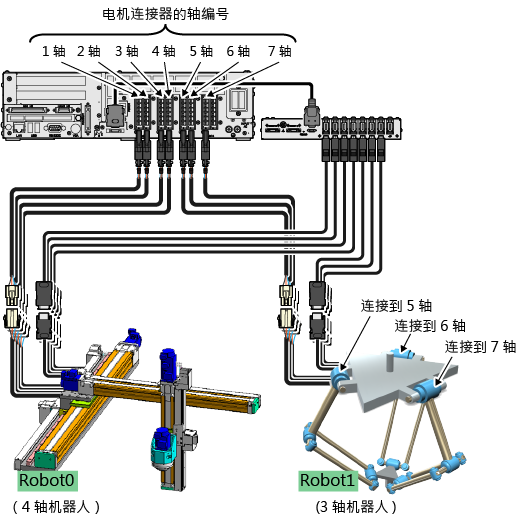
在上图中,Robot1的各电机接在MC8系列的电机连接器的5轴、6轴、7轴上。但是,在Robot1的项目数据中,从电机连接器的轴编号小的轴(“5轴”)开始,依次当作1轴、2轴、3轴处理。
另外,在程序中也一样处理。例如,通过Drive指令使接在电机连接器的5轴上的电机动作时,如下所述指定1轴进行记述:
Robot1.Drive (1, 43)发生错误时也一样。当接在电机连接器的5轴上的电机发生了错误时,错误编号及错误消息是相对1轴的。
关于错误显示和错误LOG画面,显示的是能够看清错误对象的机器人的内容。这与使用协调功能时相同。详细内容请参照“协调功能指南”的“错误显示和错误LOG画面”。
电机连接器的轴编号根据电机容量改变顺序号。请参照“附加轴使用说明书”的“配线注意事项”。
通过多功能教导器进行操作/设定
错误显示和错误LOG画面
-
关于错误显示和错误LOG画面,显示的是能够看清错误对象的机器人的内容。这与使用协调功能时相同。详细内容请参照“协调功能指南”的“错误显示和错误LOG画面”。
简单设定的显示
-
启动RC8系列机器人控制器时显示的简单设定窗口只针对Robot0显示窗口。不针对Robot1显示简单设定窗口。但是,将Robot1指定为领导,在下述操作路径中显示的简单设定窗口上,可进行Robot1的简单设定。
操作路径:[F2 机械臂]-[F6 辅助功能]-[F1 使用条件]-[F6 简单设定] 有关领导的指定方法,请参照“双臂控制用项目的概念”的“在多功能教导器上的管理”。
另外,简单设定可设定的机器人受限。详细情况请参照“操作指南”的“简单设定(多功能教导器)”。
附加轴的操作方法
-
通过多功能教导器操作附加轴时,通常按[机器人选择]按钮,将要动作的对象切换为附加轴。使用双臂控制功能时也一样,但是按[机器人选择]按钮后显示的窗口与通常不同。
显示下图所示的窗口:

首先,指定想操作的附加轴是针对哪一机器人的附加轴。要指定,从“机器人选择清单”选择对象的机器人。
接着,从“臂/附加轴切换按钮”中选择附加轴(电机的图标),在“移动方向键对应表”中以绿色显示附加轴的轴编号、与该附加轴对应的按钮。
最后按[OK]按钮,操作对象切换为附加轴。
排他功能/协调功能的设定
-
双臂控制功能的排他控制及协调控制不在2台RC8系列机器人控制器(下称RC8系列)或者MC8系列动作控制器(下称MC8系列)之间进行通信。1台RC8系列或者MC8系列针对2台机器人进行排他控制或者协调控制。因此,各功能的设定内容与通常的情形有一部分不同。
排他功能 在下述操作路径中显示的设定通常为排他通信设定,但是在双臂控制功能上为切换排他控制的有效/无效的按钮。
因此,在排他通信设定中设定的排他控制IP(0)、排他控制指令启动等待时间等不需要设定。
操作路径: [F2 机械臂] - [F6 辅助功能] - [F11 排他控制] - [F2 排他通信设定] 上述操作路径的最后按钮的[F2 排他通信设定]以[F2 排他设定]的名称显示。
由于初始值为“无效”,使用排他功能时,请务必用该按钮设为“有效”。
协调功能 不需要在下述操作路径中设定的协调设定(协调控制器设定、协调控制通信模式等)。
操作路径 : [F6 设定]-[F9 协调] 上述操作路径的最后按钮的[F9 协调]不显示。
机器人无效设定
-
即使想对一边的机器人进行教导、机器人程序的调整,如果不预先将二者的机器人接在RC8系列机器人控制器(下称RC8系列)或者MC8系列动作控制器(下称MC8系列)上,也会发生错误。
为了只连接一边的机器人也不发生错误,进行机器人的无效设定。
将登录等级设为“维护”后,如果在下述操作路径进行操作,则显示[VRC设定]窗口。
操作路径:[F6 设定]-[F2 系统信息]-[F6 VRC设定] 将[VRC设定]窗口的下述参数内不连接的机器人的参数设为“1(无效)”。
No. 项目名 79 Robot0 有效/无效设定 80 Robot1 有效/无效设定 设定后,如果重启RC8系列或者MC8系列,不再对没有连接的机器人发生未连接错误。
连接先前未连接的机器人后,请恢复设定。
双臂控制功能无效设定
-
希望像通常的独立使用机器人时那样使用Robot0时,进行双臂控制功能无效设定。
下述操作路径最后的按钮[F1 有效无效设定]是设定双臂控制功能的有效/无效的按钮。
操作路径 : [F6 设定]-[F10 双臂]-[F1 有效无效设定] 初始设定为“有效”。设为“无效”后,如果重启RC8系列机器人控制器或者MC8系列动作控制器,进入只独立使用Robot0的通常的状态。在该状态,即使Robot1没有连接,也不发生未连接错误。
EMU
Robot0和Robot1的3D视图显示
-
如果为EMU的项目添加双臂控制用项目数据,Robot0和Robot1的机器人被分别显示在3D视图上。但是,添加时的项目文件请选择Robot0的项目文件。如果选择Robot1的项目文件,只有Robot1显示在3D视图上。
将双臂控制用项目数据添加到EMU的项目中的方法与将协调功能的项目数据添加到EMU的方法相同。请参照“协调功能指南”的“向EMU追加机器人”。
另外,有关双臂控制用项目数据的文件夹构成,请参照“双臂控制用项目的概念”的“在WINCAPSIII上的管理”。
ID : 3335