
ID : 3338
使用RS-422A通信板时的关联
通过协调功能使用力感应器时,还可以设想将连接到Robot1机器人控制器的力感应器安装到Robot0的前端使用的场景。
下图为表示上述情景的图。
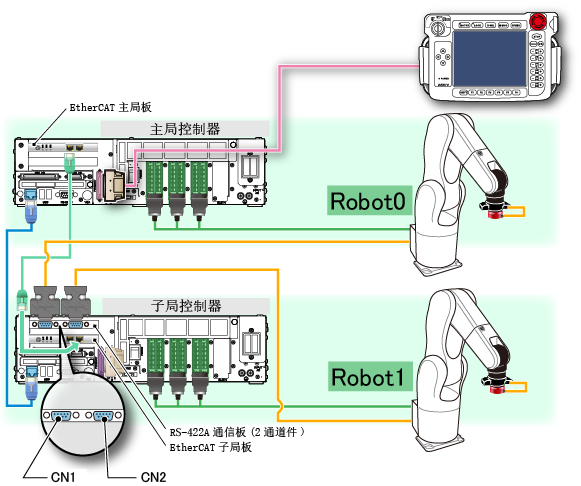
在上图中,Robot0的力感应器被连接到安装在Robot1机器人控制器上的RS-422A通信板(2通道件)的CN1(之后,Robot1:RS-422A_CN1)。
在这种情况下,需要将Robot0的力感应器和Robot1:RS-422A_CN1进行关联。
关联按以下流程进行。
1
将Robot0指定成领导。
2
如果将用户等级设为“维护”,在下一操作路径进行操作,则显示下图的“连接设定”视窗。
| 操作路径: [F2 机械臂] - [F2 力量控制] -[F5 传感器]-[F8 连接设定] -[F5 编辑] |
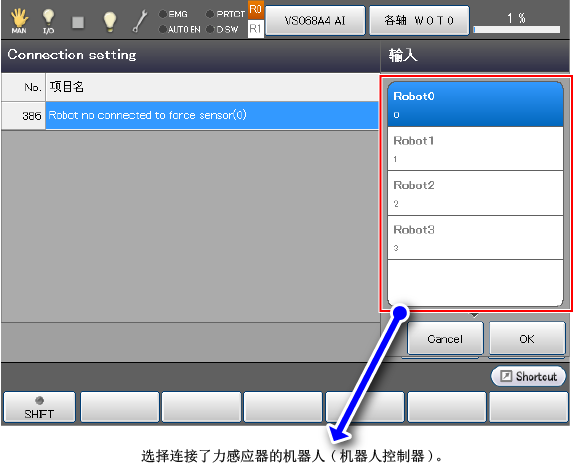
在该视窗设定将Robot0的力感应器连接到哪一个机器人(机器人控制器)。
在上图中,Robot0的力感应器被连接到安装在Robot1机器人控制器上的RS-422A通信板,因此选择“Robot1”后再按下[OK]按钮。
3
关闭[连接设定]视窗,在[传感器]视窗按下[F1 传感器设定],即显示下图的[传感器设定]视窗。
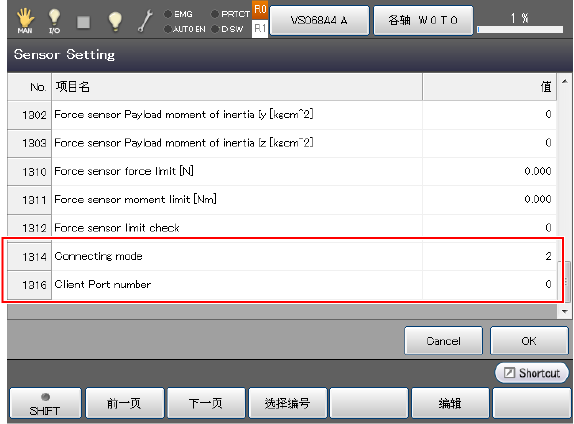
设定该视窗中的以下项目。
- 将“1314:连接方法”设定成"2:RS422"。
- 将“1316:用户端口编号”设定成连接Robot0力感应器的RS-422A通信板COM编号。
连接Robot0力感应器的RS-422A通信板COM编号可以通过以下视窗进行确认。
| 操作路径:[F6 设定]-[F5 通信与启动权]-[F2 网络与通信权] |
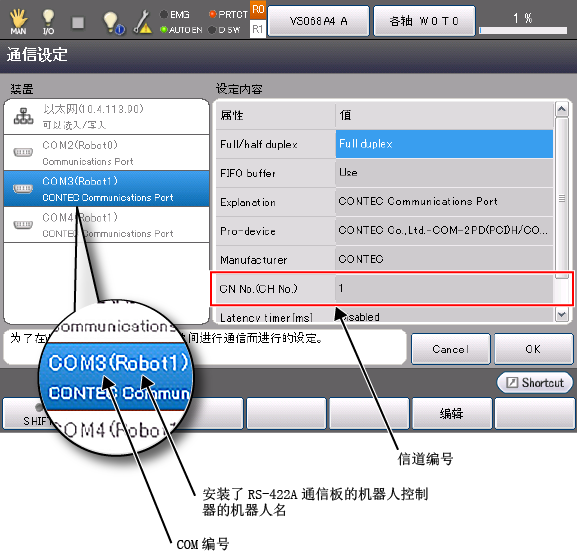
在该视窗中可以确认所有机器人控制器的端口内容。
由于Robot0的力感应器连接到Robot1:RS-422A_CN1,因此从上面的视窗可以知道COM编号为"3"。
至此,Robot0的力感应器关联结束。
所有力感应器都需要进行关联。
因此,如果是这里的系统构成,Robot1的力感应器也会同样进行关联。
ID : 3338