
ID : 1179
带力感应器的鲁棒依从功能的参数设定
参数设定详情如下所示。
- 设定各力量控制编号(依从功能的参数表编号)的参数。指定各力量控制编号的控制模式。
- 力量控制的设定分为“设定力量控制”画面、“力量控制的详细设定”画面、“传感器设定”画面三种。
- 项目名一栏中的[ ]内记述ForceParam的项目名。
- 如果指定较大的控制力,则机器人高速动作。如果在高速动作中与工件发生碰撞,则力感应器或机器人会受到过大的力,从而导致故障或损坏。调整时,为了安全,请从较小值逐渐增大控制比例,将不需要力量控制的方向设定为0%。
切换力量控制编号时,为了防止意外的动作,请确认切换后的力量控制编号中设定的参数是否为所需的设定。
设定力量控制
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] - [F6 设定]
选择力量控制编号(依从功能的参数工作台编号)1~10,并按压[OK]按钮。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 控制模式 | - | 0、1、3 | 从以下控制模式中选择“3”。 0:依从功能 1:带力感应器的依从功能 3:带力感应器的鲁棒依从功能 |
| 力限制坐标系选择 [坐标系] |
- | 0、1、2 | 从以下选项中选择坐标。 0:基础坐标系 1:工具坐标系 2:工件坐标系 |
| 目标控制力 [力] (X、Y、Z、RX、RY、RZ) |
N | -5000~5000 | 用于控制机器人的力,输出的力不超过设定力。 如果减小该值,则较小外力即可使机器人动作。 如果指定0,则将始终跟随外力进行动作。 |
| Nm | -1000~1000 |
力量控制的详细设定
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] - [F12 详细设定]
选择力量控制编号(依从功能的参数工作台编号)1~10,并按压[OK]按钮。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 偏差允许值 [PosEralw=允许位置偏差] (X、Y、Z、RX、RY、RZ) |
mm | 0~1000 | 设定臂前端位置的偏差允许值。 使用带力感应器的鲁棒依从功能时,监视从力量控制开始之后的臂前端位置移动量。 |
| deg | 0~360 | ||
| 轴偏差允许值 [Eralw=各轴允许偏差] (J1~J8) |
deg | 0~1000 | 设定各轴的偏差允许值。 使用带力感应器的鲁棒依从功能时,监视从力量控制开始之后的各轴移动量。 但是,即使设定附加轴也无效。 |
| 控制百分比 [Rate=控制百分比] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 确定利用带力感应器的鲁棒依从功能控制的比例。 想进行力量控制的方向通常请将控制比例设为100%。不想进行力量控制的方向请将控制比例设为0%。 |
| 最大并进速度 [SpMax=最大并进速度] |
mm/s | 0~10000 | 确定接触前的最大速度。 |
| 最大旋转速度 [,RSpMax = 最大旋转速度] |
deg/s | 0~10000 | 确定接触前的最大旋转速度。 |
| 接触对象的硬度等级(X、Y、Z) | 0~3 | 设定对接触对象,朝选择的坐标系的各轴(X、Y、Z)方向施加力时的接触对象的硬度等级。 0: 硬度等级0 1: 硬度等级1 2: 硬度等级2 3: 硬度等级3 硬度等级越大,越能对应硬的对象。 进行调整时,从初始值“3”开始。 |
|
| 接触对象的硬度等级(Rx、Ry、Rz) | 0~1 | 设定对接触对象,朝选择的坐标系的各轴周围(Rx、Ry、Rz)方向施加力时的接触对象的硬度等级。 0: 硬度等级0 1: 硬度等级1 硬度等级越大,越能对应硬的对象。 进行调整时,从初始值“1”开始。 |
仅能由维护设定的参数
维护设定时,除上表的项目外,还可设定下表的项目。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 特殊控制模式 | - | 0、8 | 带力感应器的鲁棒依从功能中不使用。 |
仅能由WINCAPSIII设定的参数
下表的项目仅WINCAPSIII可以设定。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 相位前进时间 (X、Y、Z、RX、RY、RZ) |
sec | 0~ |
带力感应器的鲁棒依从功能中不使用。 |
传感器设定
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] -[F5 传感器] - [F1 传感器设定]
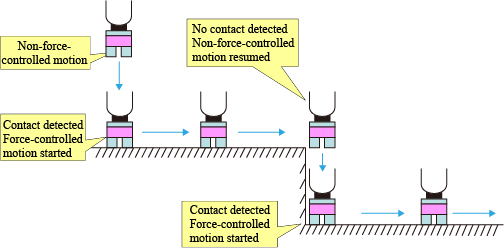
力感应器的输出值超过接触判定力、接触判定力矩的设定值时,开始与目标控制力对应的力量控制。在这里,将力量控制开始的状态作为与对象物接触的状态。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 鲁棒依从接触判定力 | N | 0~ | 来自力感应器的值的绝对值超过设定值时,开始与目标控制力对应的力量控制。 请将设定的值设定为比目标控制力小的值。 |
| 鲁棒依从接触判定力矩 | Nm | 0~ | 来自力感应器的值的绝对值超过设定值时,开始与目标控制力对应的力量控制。 请将设定的值设定为比目标控制力小的值。 |
- 在目标控制力设定为0的方向,始终进行模仿动作。因此,无论在“传感器设定”画面中设定的参数值如何,都始终在力量控制状态下动作。
- 请将接触判定力、接触判定力矩的设定值设定为力感应器的噪音以上的值。如果设定比噪音值小的值,则无法正确判定与接触对象的接触。
关于与对象的接触
启用带力感应器的鲁棒依从功能后,将进行空动作,直到根据传感器的输出值判断出与物体接触为止。
空动作时的速度根据设定的“最大并进速度”或“最大旋转速度”的设定值和“控制比例”,按下面的式子确定。
- 空动作速度 = (最大并进速度或最大旋转速度) × 控制比例
空动作时,无论机器人的内部速度、外部速度如何,均以根据设定的参数计算出的空动作速度动作,因此,如果参数未正确设定,可能会高速动作。
设定参数时请充分注意。
如果想变更机器人的动作速度,请变更“最大并进速度”或“最大旋转速度”、“制控制比例”的参数。这些参数在上述的“力量控制的详细设定”中。
ID : 1179