
ID : 5469
带力感应器的依从功能的参数设定
参数设定详情如下所示。
- 设定各力量控制编号(依从功能的参数表编号)的参数。指定各力量控制编号的控制模式。
- 仅在必要项目中无法使用时,根据需要设定“其它参数”。
- 项目名一栏中的[ ]内记述ForceParam的项目名。
- 如果指定较大的控制力或较小的惯性、粘性、弹性值,则机器人高速动作。如果在高速动作中与工件发生碰撞,则力感应器或机器人会受到过大的力,从而导致故障或损坏。调整时为了安全起见,请首先逐渐减小默认的弹性、粘性、惯性的百分比值。另外,也要从较小值逐渐增大控制百分比值,将不需要力量控制的方向设定为0%。
- 进行恒压推压或吻合动作时,输入仅变更粘性参数便可进行调整的初始值。如果增大粘性,则可能在力量控制开始时发生错误。此时,请增大惯性参数的值来进行调整。
- 调整时请首先设定“目标控制力”和“控制百分比”。关于调整步骤,请参照“调整步骤”。
必要项目
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] - [F6 设定]
选择力量控制编号(依从功能的参数工作台编号)1~10,并按压[OK]按钮。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 控制模式 | - | 0、1、3 | 从以下选项中选择控制模式。 0:依从功能 1:带力感应器的依从功能 3:带力感应器的鲁棒依从功能 |
| 力限制坐标系选择 [坐标系] |
- | 0、1、2 | 从以下选项中选择坐标。 0:基础坐标系 1:工具坐标系 2:工件坐标系 |
| 目标控制力 [力] (X、Y、Z、RX、RY、RZ) |
N | -5000~5000 | 用于控制机器人的力,输出的力不超过设定力。 如果减小该值,则较小外力即可使机器人动作。 注:控制模式下选择不使用力感应器的“依从功能”时,控制力会根据姿势和动作不同而变化,因此请设定符合实际作业的力。 |
| Nm | -1000~1000 |
其它参数(根据需要)
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] - [F12 详细设定]
选择力量控制编号(依从功能的参数工作台编号)1~10,并按压[OK]按钮。
结合上述“控制模式”的设定,仅显示使用的参数。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 假想惯性 [Mass=惯性] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 根据加速度设定所增加阻力的比例。 如果减小该值,则可快速移动。 |
| 假想粘性 [Damp=粘性] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 设定根据速度增加的抵抗力的比例。 如果减小该值,则可快速移动。 |
| 假想弹性 [Spring=柔度] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 设定根据位置增加的返回力的强度比例。 如果减小该值,则即使凭借较弱的力也可使其产生较大移动。 |
| 偏差允许值 [PosEralw=允许位置偏差] (X、Y、Z、RX、RY、RZ) |
mm | 0~1000 | 设定臂前端位置的偏差允许值。 使用带力感应器的依从功能时,监视从力量控制开始之后的臂前端位置移动量。 |
| deg | 0~360 | ||
| 轴偏差允许值 [Eralw=各轴允许偏差] (J1~J8) |
deg | 0~1000 | 设定各轴的偏差允许值。 使用带力感应器的依从功能时,监视从力量控制开始之后的各轴移动量。 但是,即使设定附加轴也无效。 |
| 控制百分比 [Rate=控制百分比] (X、Y、Z、RX、RY、RZ) |
% | 0~100 | 通过带力感应器的依从功能确定控制的百分比。 想进行力量控制的方向通常请将控制比例设为100%。不想进行力量控制的方向请将控制比例设为0%。 |
| 最大并进速度 [SpMax=最大并进速度] |
mm/s | 0~10000 | 确定接触前的最大速度。 |
| 最大旋转速度 [,RSpMax = 最大旋转速度] |
deg/s | 0~10000 | 确定接触前的最大旋转速度。 |
仅能由维护设定的参数
维护设定时,除上表的项目外,还可设定下表的项目。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 特殊控制模式 | - | 0、8 | 设定力量控制中的特殊控制条件。 0:无效 8:重新开始速度限制 |
| 假想惯性 (X、Y、Z、RX、RY、RZ) |
N、kgcmˆ2 | - | 设定上述“假想惯性”的基准值。该值为上述指定为100%时的值。 |
| 假想粘性 (X、Y、Z、RX、RY、RZ) |
Ns/m、Ncms/rad | - | 设定上述“假想粘性”的基准值。该值为上述指定为100%时的值。 |
| 假想弹性 (X、Y、Z、RX、RY、RZ) |
N/m、Ncm/rad | - | 设定上述“假想弹性”的基准值。该值为上述指定为100%时的值。 |
仅能由WINCAPSIII设定的参数
下表的项目仅WINCAPSIII可以设定。
| 项目名 | 单位 | 范围 | 详细 |
|---|---|---|---|
| 相位前进时间 (X、Y、Z、RX、RY、RZ) |
sec | 0~ | 设定相位前进时间。 在振动的情况下,请将该参数值从初始值开始慢慢调大。 值过大导致振动变大时,请缩小该值。 |
关于速度限制
为减小与物体最初接触时的力,带力感应器的依从功能在开始力量控制时设有速度限制。接触物体后速度限制将解除,之后在无速度限制的状态下进行力量控制。
速度限制中的机器人的动作速度被限制在“最大平移速度”或者“最大旋转速度”的设定值以下。
“最大平移速度”及“最大旋转速度”位于上述的“其他参数”中。
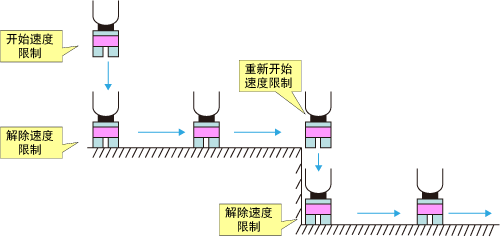
重新开始速度限制
如果将参数“特殊控制模式”设定为“重新开始速度限制”,则一旦离开物体将重新开始速度限制。
在下图所示工序中,力量控制期间离开物体后又再次接触物体时,可减小与物体再次接触时的力。
ID : 5469