
ID : 3045
4轴或6轴机器人的追加设定
对应机型和对应Ver
| 机器人类型名 | 对应Ver | ||
|---|---|---|---|
| 4轴SCARA机器人 | Ver.2.3 | ||
| 4轴XR机器人 | Ver.2.5 | ||
| 4轴XYZT机器人 | Ver.2.5 | ||
| 4轴XYMZT 机器人 | Ver.2.5 | ||
| 6轴A型机器人 | Ver.2.5 |
概要
4轴机器人时
通过4轴机器人在直动轴中使用滚珠丝杠花键轴时,需要追加设定参数。
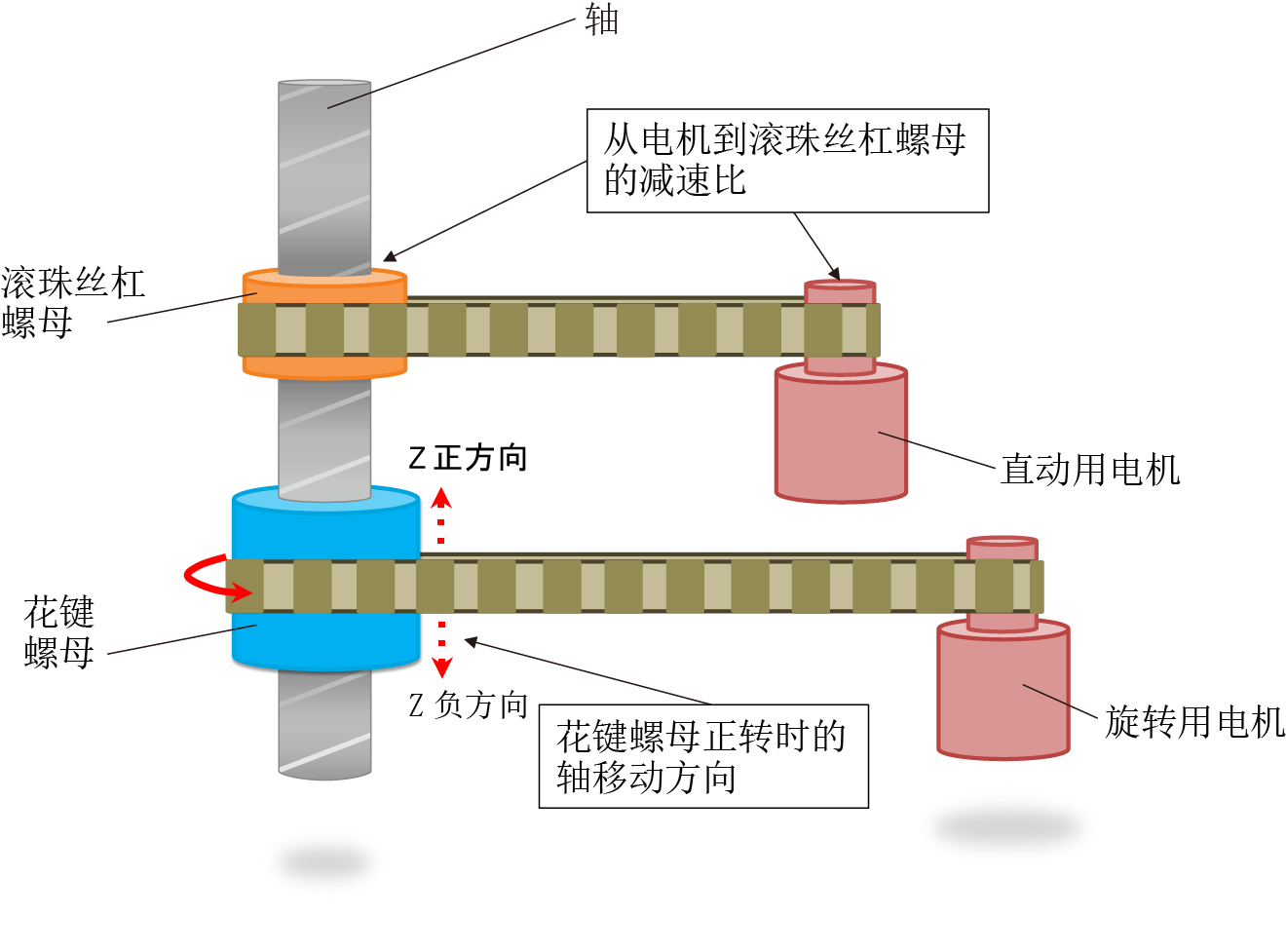
滚珠丝杠花键轴由下图所示“滚珠丝杠螺母”、“花键螺母”与“轴”构成。旋转滚珠丝杠螺母时,轴将会进行直动运行,而旋转花键螺母时,轴将会在旋转的同时进行直动运行。
若只想旋转轴时,需要同时旋转滚珠丝杠螺母于花键螺母。此时,如需计算相对于花键螺母旋转量的滚珠丝杠螺母旋转量以及旋转方向时,需要设定以下2个参数。
- 从电机轴到滚珠丝杠螺母的减速比
- 沿法兰盘正向旋转的方向旋转花键螺母时,轴将会向基准坐标Z轴的哪个方向运行
6轴机器人时
6轴型A机器人时,使5轴动作时,伴随其动作量,可使用6轴移动的机构。这时,需要设定以下二个参数。
- 干扰轴减速比
- 5轴正转时的6轴移动方向
设定方法
使用运动学设定工具选择的机器人类型是可追加设定类型时,在机械臂长度设定画面显示追加设定项目。
4轴机器人时
通过“使用滚珠丝杠花键轴”的项目选择“使用”,可设定追加的参数。例如,4轴SCARA机器人的画面如下所示。
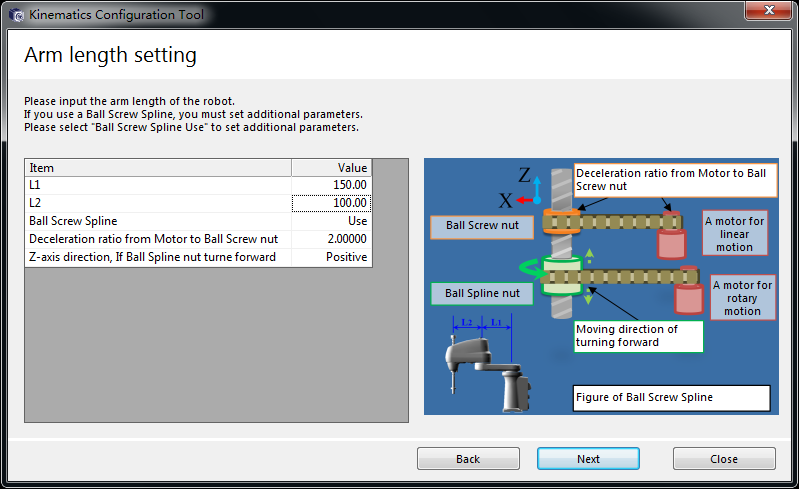
- 只有在使用“滚珠丝杠花键轴”时,才可进行该设定。若在不使用滚珠丝杠花键轴的情况下进行本设定时,机器人可能会出现意料之外的危险动作。
- 设定与设计值不同的参数时,机器人会出现意料之外的危险动作,因此设定时请充分注意。
6轴机器人时
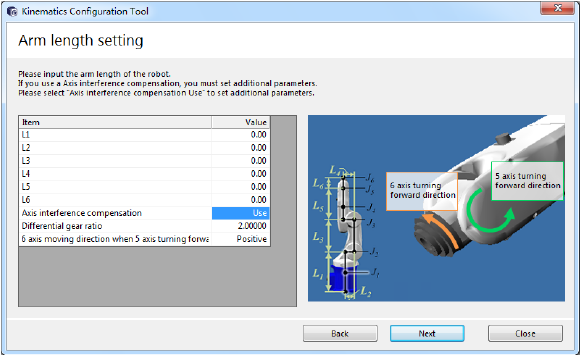
通过“轴干扰补正”的项目选择“使用”,可设定追加的参数。
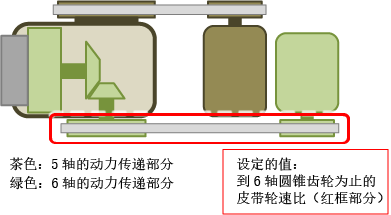
作为具体示例,以下是6轴动力传递中使用圆锥齿轮的示例。
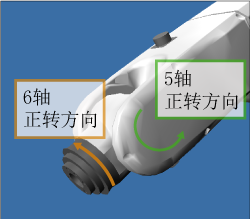
在图中的示例中,6轴电机在第二机械臂侧,动力通过皮带、圆锥齿轮和减速机(绿色部分)传递到6轴的输出轴。在这个结构中,通过茶色表示的5轴动作后,圆锥齿轮接触的部分追从,即使6轴电机没有旋转,6轴也会旋转。使轴干扰补正有效,可对伴随5轴的动作的6轴的旋转进行补正。
请在“干扰轴减速比”中输入红框内的皮带轮速比。伴随5轴正转,6轴正转时,请将“5轴正转时的6轴旋转方向”设定为“正”,否则,请设定“负”。
- 不需要时,请不要进行这个设定。例如,在4轴机器人上,若在不使用滚珠丝杠花键轴的情况下进行本设定时,机器人可能会出现意料之外的危险动作。
- 设定与设计值不同的参数时,机器人会出现意料之外的危险动作,因此设定时请充分注意。
设定值的限制
4轴机器人时
“从电机轴到滚珠丝杠螺母的减速比”中,只能设定大于0的值。
6轴机器人时
“干扰轴减速比”中,只能设定大于0的值。
ID : 3045