
ID : 2850
机械臂长度设定
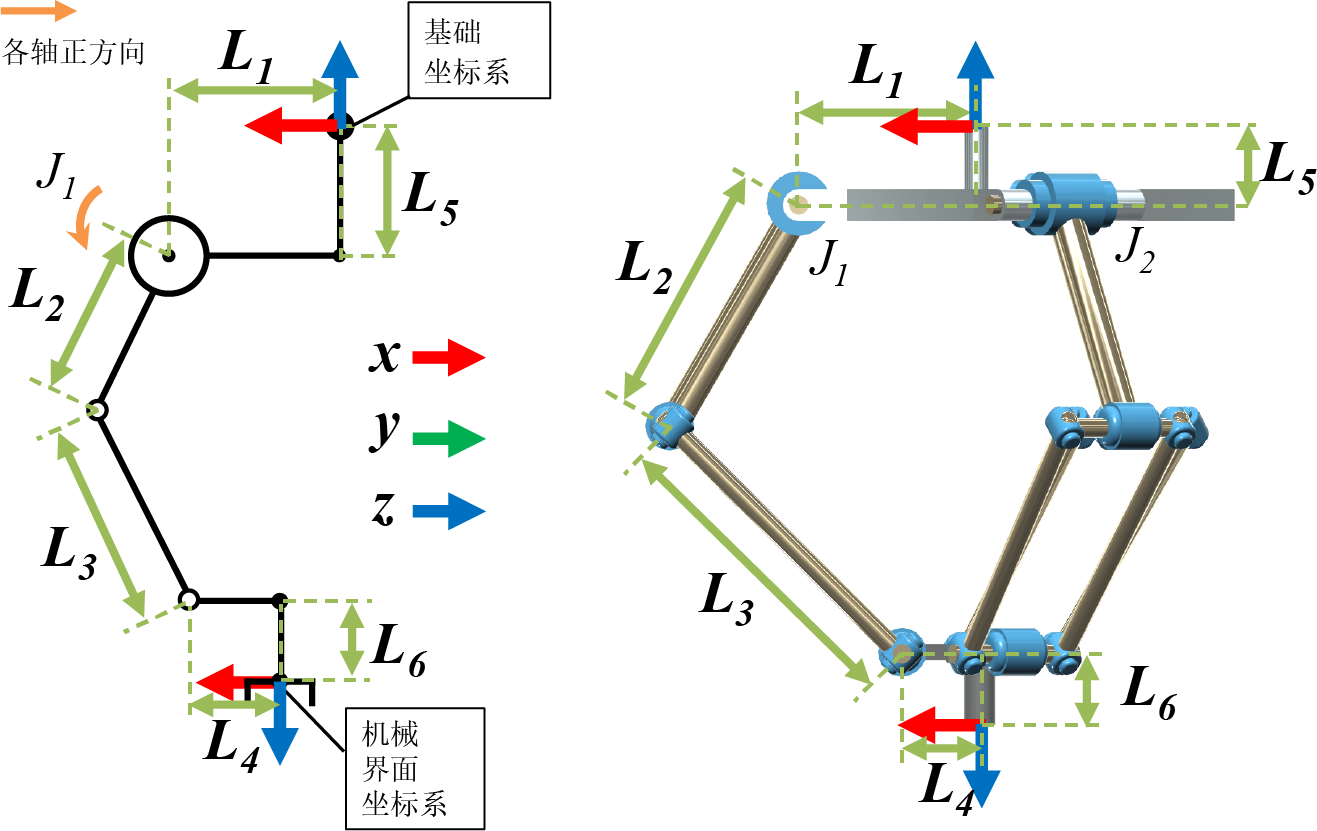
3轴并联连杆机器人
输入图中的L1至L6的长度。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L1 | 从基础坐标原点到关节轴中心的长度 | 0mm以上 |
| L2 | 从关节轴中心到肘部的长度 | 0mm以上 |
| L3 | 从肘部到法兰侧面的长度 | 0mm以上 |
| L4 | 从法兰侧面到法兰中心的长度 | 0mm以上 |
| L5 | 从基础坐标原点到关节轴中心的Z轴方向的偏移 | 0mm以上 |
| L6 | 从法兰面到臂前的Z轴方向的长度 | 0mm以上 |
 |
||
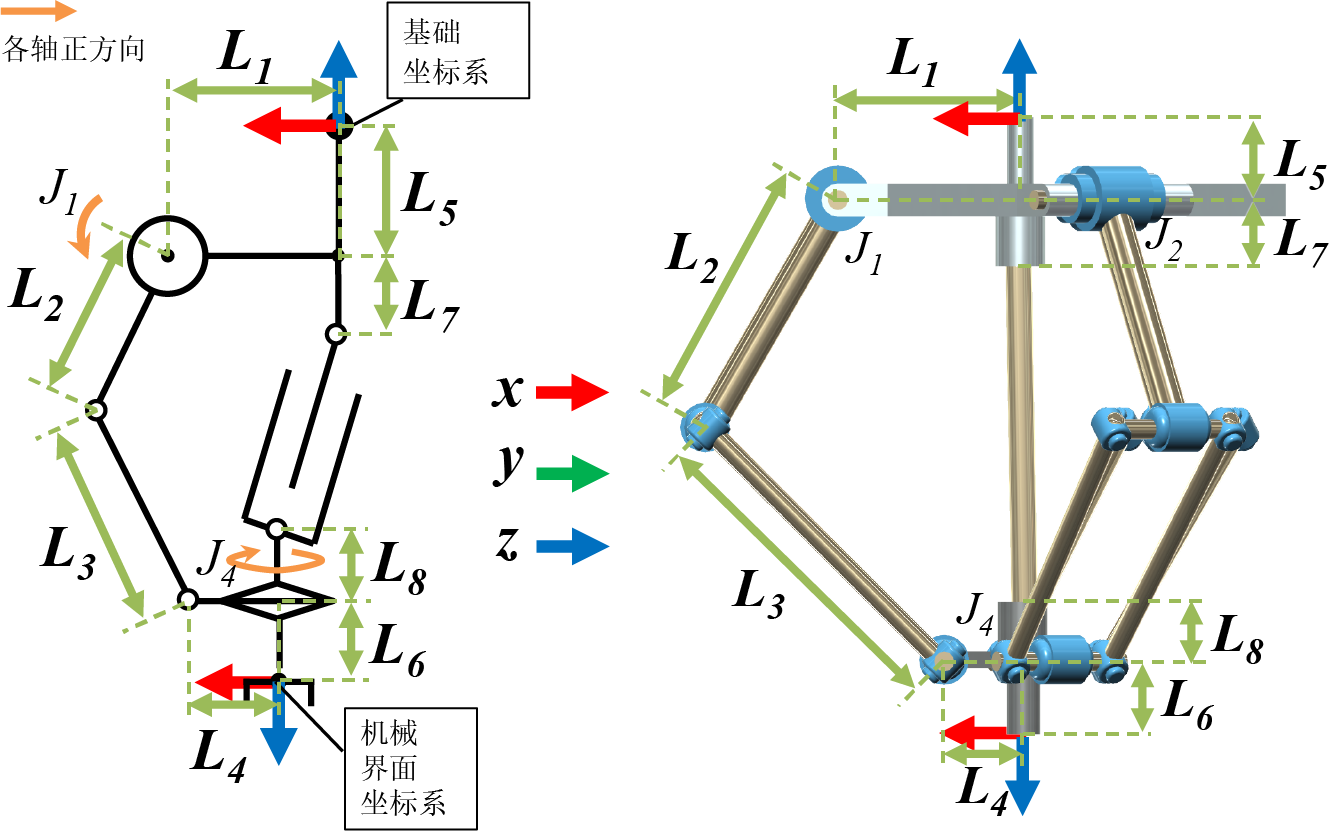
4轴并联连杆机器人
除了上述的3轴并联连杆机器人中设定的长度外,输入L7和L8。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L7 | 第4轴动力传递用伸缩部安装部的长度(上侧) | 0mm以上 |
| L8 | 第4轴动力传递用伸缩部安装部的长度(下侧) | 0mm以上 |
 |
||
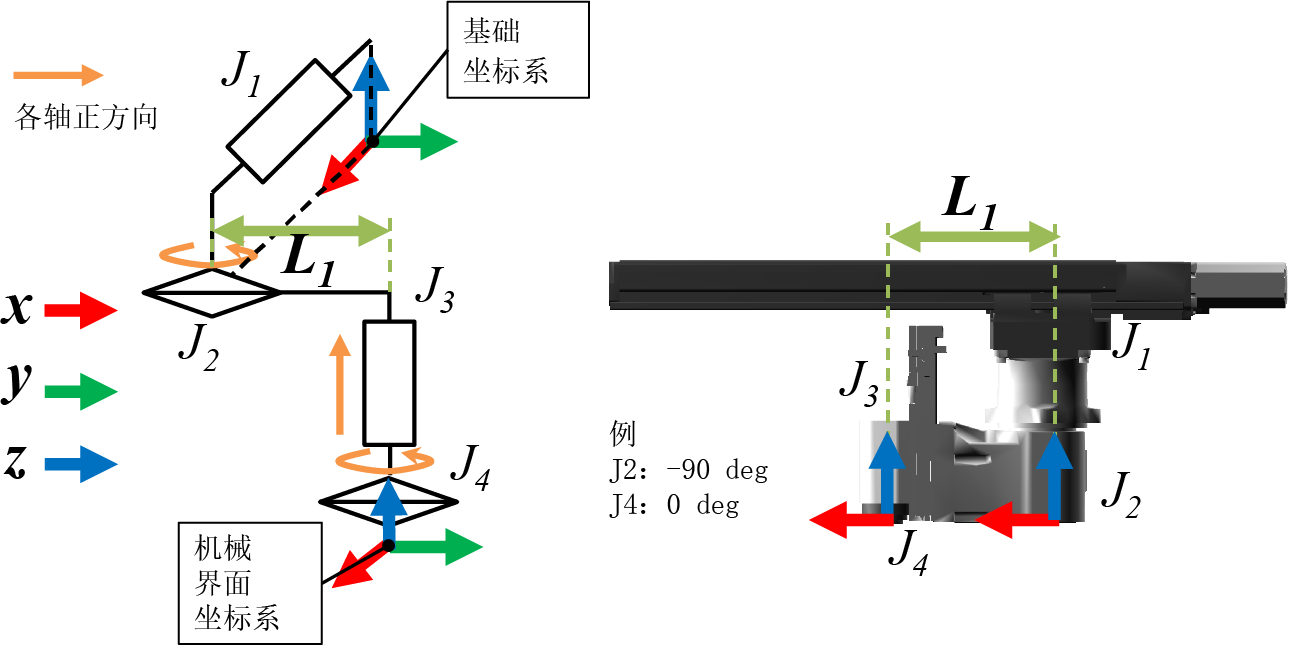
4轴XR机器人
设定相当于图中的L1的长度。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L1 | 从第2轴旋转中心到第4轴旋转中心的长度 | 0mm以上 |
 |
||
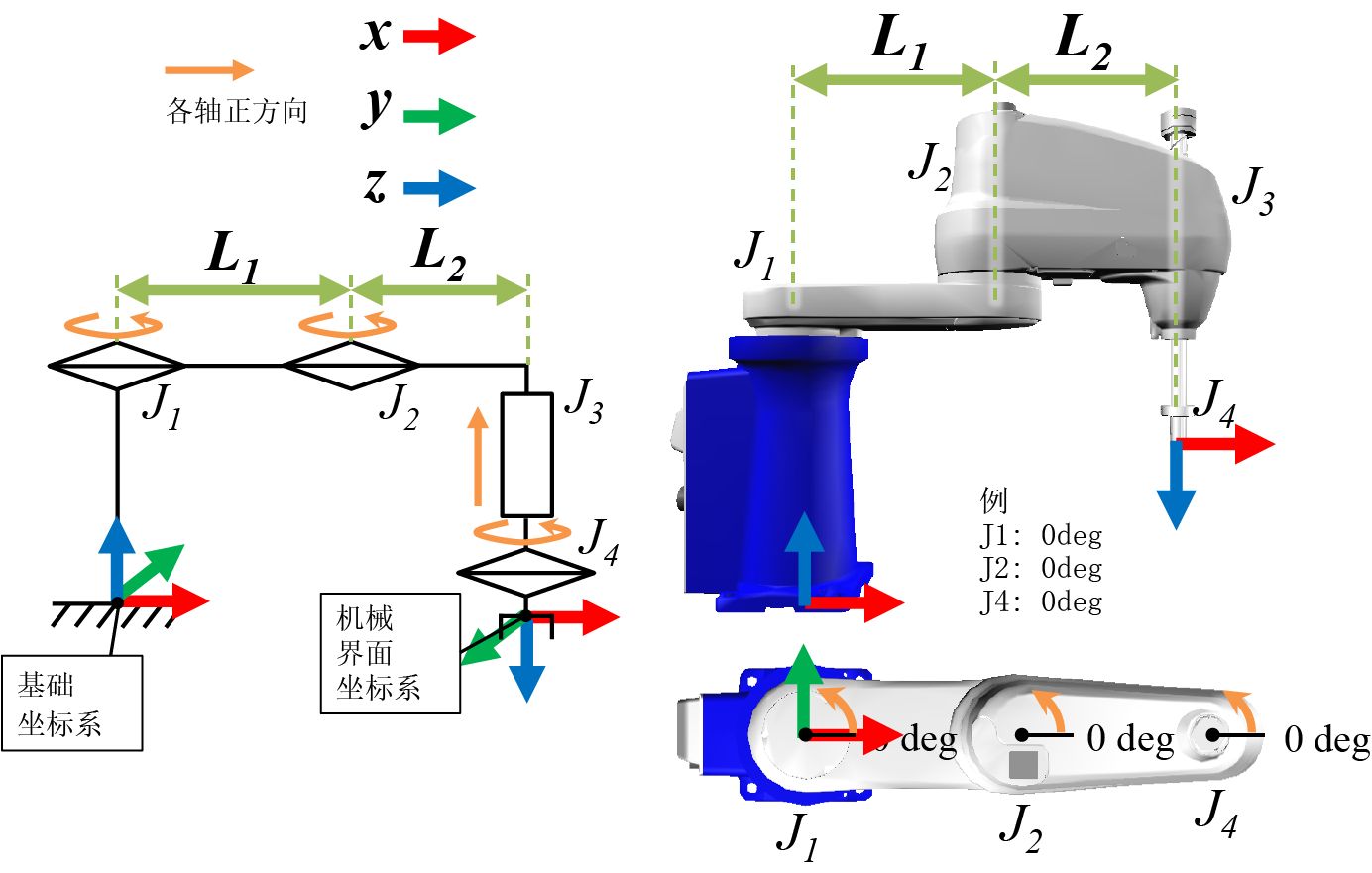
4轴SCARA机器人
设定图中的L1、L2的长度。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L1 | 从第1轴旋转中心到第2轴旋转中心的长度 | 大于0mm |
| L2 | 从第2轴旋转中心到第4轴旋转中心的长度 | 大于0mm |
 |
||
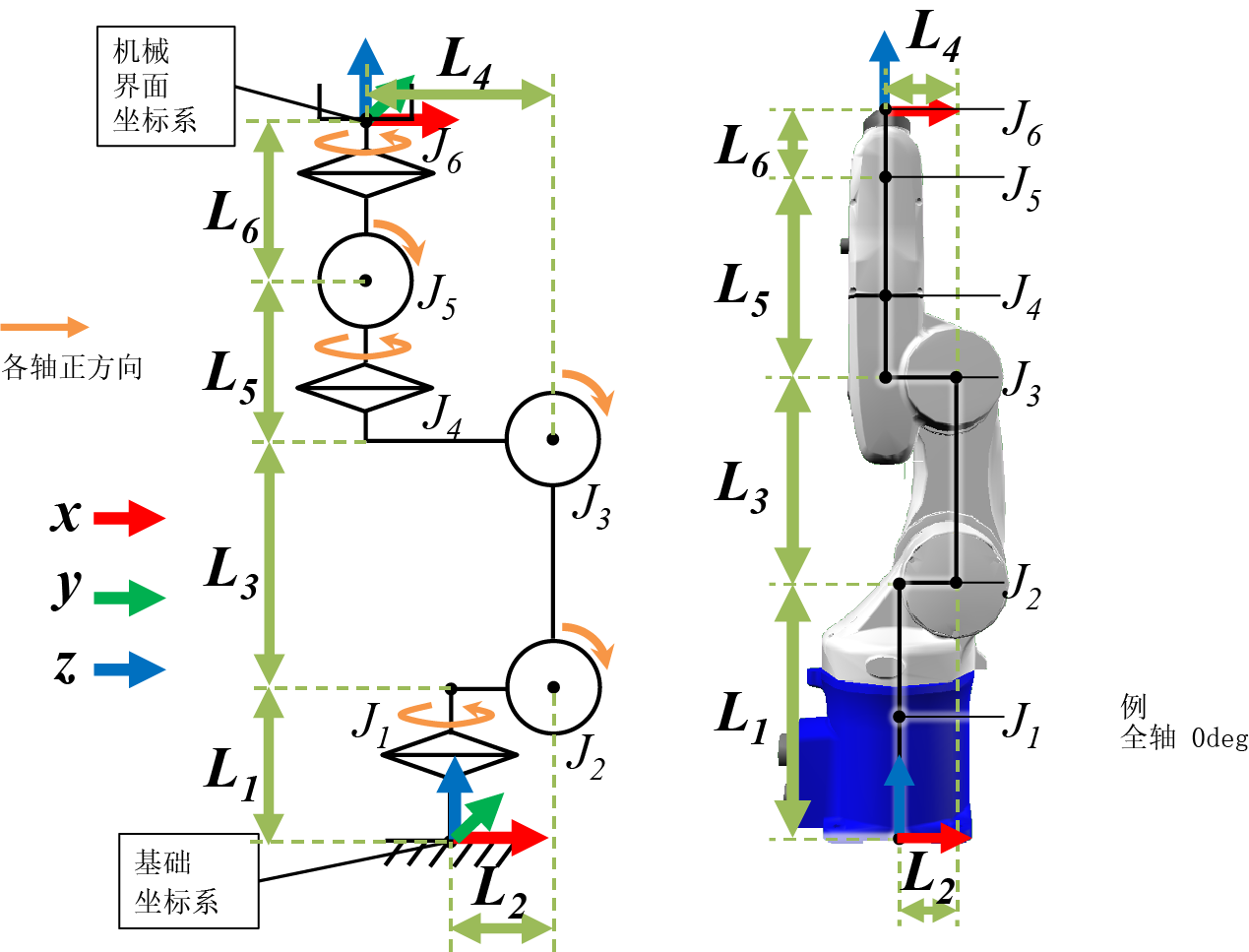
6轴A型机器人
输入图中的L1至L6的长度。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L1 | 从基础坐标原点到第2轴中心的Z轴方向的长度 | 0mm以上 |
| L2 | 从基础坐标原点到第2轴中心的X轴方向的偏移 | 0mm以上 |
| L3 | 从第2轴中心到第3轴中心的Z轴方向的长度 | 0mm以上 |
| L4 | 从第3轴中心到第4轴中心的X轴方向的偏移 | 0mm以上 |
| L5 | 从第3轴中心到第5轴中心的Z轴方向的长度 | 0mm以上 |
| L6 | 从第5轴中心到法兰面的Z轴方向的长度 | 0mm以上 |
 |
||
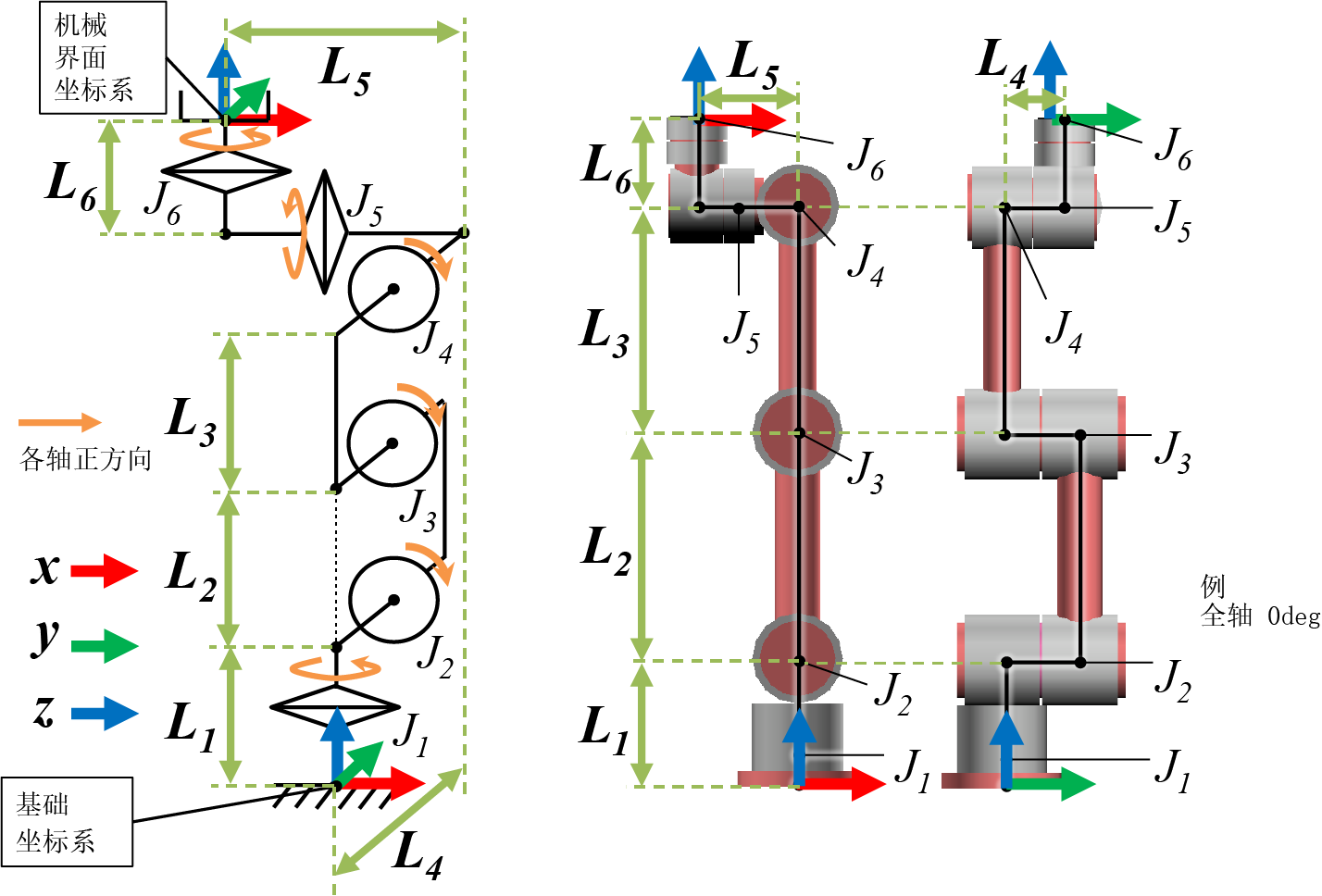
6轴B型机器人
输入图中的L1至L6的长度。(单位:mm)
| 机械臂编号 | 说明 | 机械臂长度 |
|---|---|---|
| L1 | 从基础坐标原点到第2轴中心的Z轴方向的长度 | 0mm以上 |
| L2 | 从第2轴中心到第3轴中心的Z轴方向的长度 | 0mm以上 |
| L3 | 从第3轴中心到第4轴中心的Z轴方向的长度 | 0mm以上 |
| L4 | 从基础坐标原点到第5轴中心的Y轴方向的偏移 | 0mm以上 |
| L5 | 从基础坐标原点到第6轴中心的X轴方向的偏移 | 0mm以上 |
| L6 | 从第4轴中心到第6轴中心的Z轴方向的长度 | 0mm以上 |
 |
||
ID : 2850