
ID : 2842
使用前注意事项
在此说明使用安全动作前需要了解的注意事项。
根据机器人控制器的引擎板型式的不同,有的部位的内容不同。
安全使用的注意事项
- 安全动作规格搭载了即使无安全栅栏也人和机器人能在同一空间作业(协同作业)的安全功能。协同作业时,要对设计的机器人系统实施风险评估,采取安全对策的基础上,确认对人造成的危险是降到十分低后再使用。
- 安全动作功能是监视机器人位置、速度,在机器人超出规定范围时使机器人停止的功能。这不是人体等其他物品接触机器人时自动限制机器人力量的功能。
- 设置安全光幕等人体检测装置时,请注意以下事项:
- 由于ISO 13855等标准规定了人体进入检测区域后达到危险部位前机器人停止所需的最短距离(安全距离),为了能够在大于最短距离的位置检测出来,请设置人体检测装置。
计算安全距离时,请考虑机器人的停止距离因动作速度而变。
有关机器人的停止距离,请参照各机器人的使用说明书。 - 当危险部位在人体检测装置没有设置的方向上,或者人体从检测范围外靠近时,不保证安全。
请设置安全栅等,实施安全对策。
- 由于ISO 13855等标准规定了人体进入检测区域后达到危险部位前机器人停止所需的最短距离(安全距离),为了能够在大于最短距离的位置检测出来,请设置人体检测装置。
对现有功能的影响
RC8A(安全动作)机器人控制器相对于RC8A(标准)机器人控制器,有“无法再使用的功能”、“有可能检出错误的功能”、“使用方法受限的功能”。详细内容请参照“对现有功能的影响”
安全动作特有的错误
以下阐述安全动作特有的错误。
购买后首次接通电机时的错误
购买后首次接通电机时,有时会发生超出软件限位的错误。
这是包装时将轴移到软件限位之外所引发的错误,因此不是故障。请通过以下之一的方法解除:
- 请解除电机的制动器,用手将机器人移到软件限位内。
- 为了在发生超出软件限位的错误后也能通过多功能教导器或小型教导器移动机器人,将监视无效输入参数设为有效,接通(短接)监视无效输入信号。然后,通过手动模式将机器人移到软件限位内。错误解除后,不使用监视无效输入信号时,请将监视无效输入参数恢复为无效。
在Mini I/O及Motion I/O的电源上使用外部电源时的错误
在Mini I/O及Motion I/O的电源上使用了外部电源时,如果不供给外部电源,而接通机器人控制器的电源,或者晚于机器人控制器的电源接头供给外部电源,将发生错误,不能使机器人动作。
请在接通机器人控制器的电源前,供给外部电源。
关于Mini I/O、Motion I/O的各信号与设备的连接
关于Mini I/O、Motion I/O的各信号与设备的连接,有以下的特点、注意事项。
特点
自动允许输入(Mini I/O)、SS1(Motion I/O)等的安全电路的信号基本上只能连接接点(继电器接点、开关等的接点),但以下的信号可直接输入安全传感器的输出信号(晶体管输出):(下称“可连接传感器的输入”)
| 机器人控制器的引擎板型式 | 可连接传感器的输入 |
|---|---|
| N、7 |
|
| E |
|
例如,可组建这样的系统:在SS2上连接区域传感器,区域传感器检出人体等的进入后,使机器人停止。
但是,上述输入信号有设定输入的信号是“接点”还是“晶体管输出”的参数。由于机器人控制器出厂时输入的信号被设为“接点”,连接安全传感器时需要变更设定。详情请参照以下的注意事项。
注意事项
- 连接Mini I/O、Motion I/O的设备请在实施风险评估之上,选择与要设计的安全级别相符的产品。
- 请从相同的电源装置为Mini I/O、Motion I/O供电。
- 在可连接传感器的输入(参照“特点”的表)上连接安全传感器时,请注意以下事项。
- 要连接的安全传感器请使用支持以下事项的产品。
·得到安全认证
·输出为PNP集电极开路型号
·输出被2重化
·输出OFF脉冲
·2重化输出的OFF脉冲不重叠
·输出为负逻辑(Low电平时起作用) - 可连接传感器的输入的逻辑为负逻辑(在Low电平时起作用)。安全传感器请使用输出信号为负逻辑的产品。
- 为了确认连接的设备是否正常,可连接传感器的输入定期监视OFF脉冲(处于Hight电平状态期间,瞬间变为Low电平)是否输入。如果不输入OFF脉冲,将会出错,因此请选择输出满足以下所示的规格的OFF脉冲的安全传感器。
机器人控制器的引擎板型式 OFF脉冲的规格 N、7 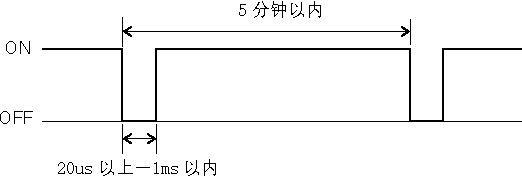
E 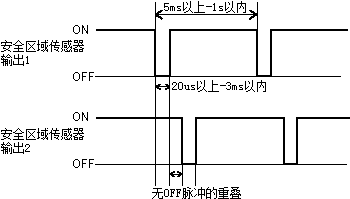
- 需要变更可连接传感器的输入的输入设定。通过WINCAPSIII设定以下的参数后,请通过RC8A安全参数工具将“监视所需的数据”发给机器人控制器,重启机器人。
操作路径:[项目(P)]-[参数(T)]-安全 No. 名称 连接安全传感器时的设定 28 区域传感器SS2输入设定 将连接安全传感器的输入设为“1:有效”。 29 区域传感器RSM1输入设定 30 区域传感器RSM2输入设定 31 区域传感器RSM3输入设定 32 区域传感器TOOL0输入设定(*) 33 区域传感器TOOL1输入设定(*) 34 区域传感器TOOL2输入设定(*) 35 区域传感器TOOL3输入设定(*) 36 区域传感器监视区域0无效输入设定(*) 37 区域传感器监视区域1无效输入设定(*) 38 区域传感器监视区域2无效输入设定(*) 39 区域传感器监视区域3无效输入设定(*) 40 区域传感器监视无效输入设定(*) 41 区域传感器SS1输入设定(*) 42 区域传感器基准位置确认输入设定(*)
(*)限机器人控制器的引擎板型式为“E”的情形 - 请从为Mini I/O、Motion I/O供电的电源装置,为要连接的安全传感器供电。
- 为各可连接传感器的输入分配的连接引脚数为4。这是因为为了将接点接在2个回路上,每个回路使用2个引脚。连接安全传感器时,每个回路只连接1个引脚,因此请使剩余的引脚开路。
例如,在SS2上连接安全传感器时,分配的针脚为以下的4个引脚(参照“Motion I/O输入信号引脚排列”)
端子No. 名称 端子No. 名称 1 SS2输入1-1 35 SS2输入1-2 17 SS2输入2-1 51 SS2输入2-2
在这4个引脚中,连接安全传感器的引脚为第1个回路端子No.35,第2个回路端子No.51。使端子No.1和17开路。
用名称区别要连接的引脚。按照以下的规则,描述可连接传感器的输入的名称。
信号名称m-n
“m”表示回路,“n”表示回路内的引脚区分。请将安全传感器接在“n”为“2”的引脚上。
在“安全传感器的连接回路例子”中记载了具体例子,请参照。
- 要连接的安全传感器请使用支持以下事项的产品。
- 安全回路的输出信号输出的是确认连接的设备是否正常的脉冲(瞬间反转状态)。因此,连接设备时,请选择输出脉冲也不会误动作的设备。
输出脉冲的输出信号一览与脉冲的规格如下:
另外,Motion I/O的输出信号,全部是PNP类型信号。- 输出脉冲的输出信号一览
信号名称 连接器 信号类型 自动模式相互监视输出 Mini I/O NPN类型/PNP类型
(购买机器人控制器时选择)SOS输出 Motion I/O 仅PNP类型 SLP输出 RSM1输出 RSM2输出 RSM3输出 RPM输出 基准位置确认输出 - 脉冲的规格
型式(*1)
输出信号 脉冲的规格 N、7 ON时(*2) 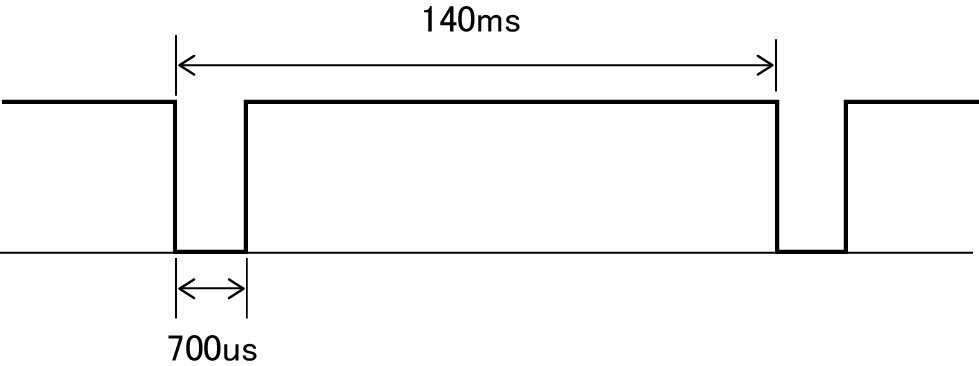
OFF时(*3) 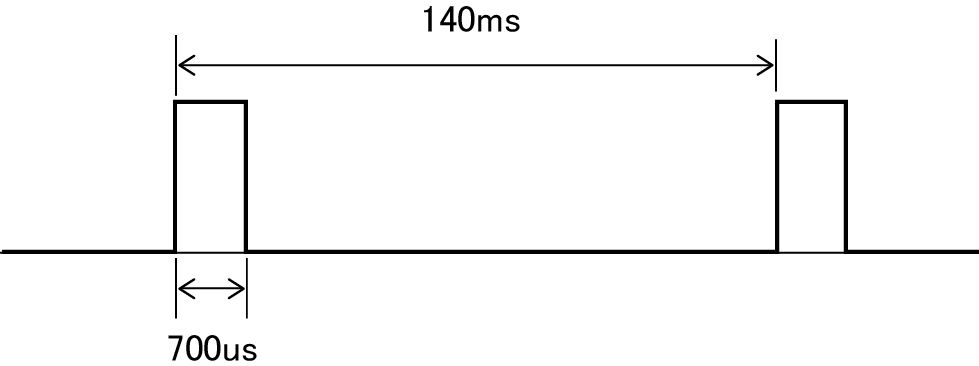
E ON时(*2) 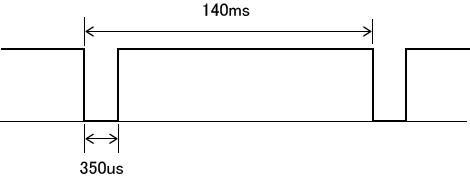
OFF时(*3) 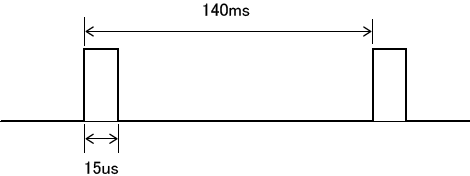
(*1)机器人控制器的引擎板型式
(*2)输出信号ON时OFF脉冲发生
(*3)输出信号OFF时ON脉冲发生
- 输出脉冲的输出信号一览
安全传感器的连接回路例子
以下表示连接回路例子:
- 前提条件
- Mini I/O、Motion I/O的电源为外部电源
- 在SS2、RSM1上连接安全传感器
- 电源与安全传感器的连接回路例子

- 设定参数
WINCAPSIII的操作路径:[项目(P)]-[参数(T)]-安全 No. 名称 设定 28 区域传感器SS2输入设定 1:有效 29 区域传感器RSM1输入设定 1:有效 30 区域传感器RSM2输入设定 0:无效 31 区域传感器RSM3输入设定 0:无效
发送“监视所需的数据”时的注意事项
向机器人控制器发送“监视所需的数据”后,断开机器人控制器的电源时,发送完成后,请等待10秒,然后断开。
没有等待10秒时,下次电源接通时,有时会出现表示安全参数的传输未完成的错误。
出现错误时,请再次向机器人控制器发送“监视所需的数据”后,等待10秒,然后断开电源。
使用MC8A安全动作规格时的注意事项
使用MC8A安全动作规格时,除了注意上述内容外,也请注意以下内容:
- 不能使用Robot Position Monitoring (RPM)。
由于不能使用Robot Position Monitoring (RPM),需要将监视区域无效输入设为无效。
首先,请通过WINCAPSIII进行[项目(P)]-[参数(T)]的操作,将安全参数No.11~14(监视区域0-3无效输入设定)全部设为“0:无效”,保存项目。然后,请通过RC8A安全参数工具将“监视所需的数据”发给机器人控制器,重启机器人。 - 请不要通过WINCAPSIII创建监视区域。
如果通过WINCAPSIII创建监视区域,执行[监视区域数据输出](参照“监视模型的创建和保存”),在用RC8A安全参数工具打开项目时将出错。错误地执行了[监视区域数据输出]时,请重新创建项目。
ID : 2842