
ID : 2487
监视模型的创建和保存
用WINCAPSIII的臂建模功能创建监视模型,输出数据。
监视模型的创建是指监视对象的模型创建与限制领域的模型创建。
新建项目
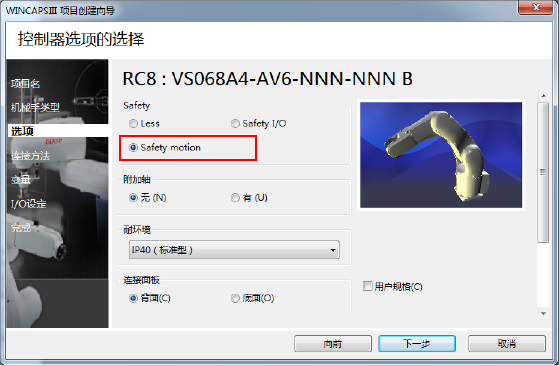
使用项目创建时的“控制器选项的选择”选择安全功能的“安全动作”。
项目新建的详细步骤请参照启动手册的“WINCAPSIII的启动”。
监视对象模型的创建步骤
- 机器人
项目新建时自动生成指定型式的模型。 - 工具
使用WINCAPSIII创建工具的模型和设定工具坐标系。模型使用臂建模功能创建,工具坐标系使用设定工具进行设定。可使用的工具编号为0~15。 - 附加轴
如果使用附加轴,在新建项目时指定“有”。
至此,完成创建监视对象。
限制领域的创建步骤
在这里设定暂时限制领域和常时限制领域。
暂时限制领域为对象(BOX)、常时限制领域为栅栏模型。
暂时限制领域(对象模型)的创建步骤
以下说明对象模型的创建步骤。
1
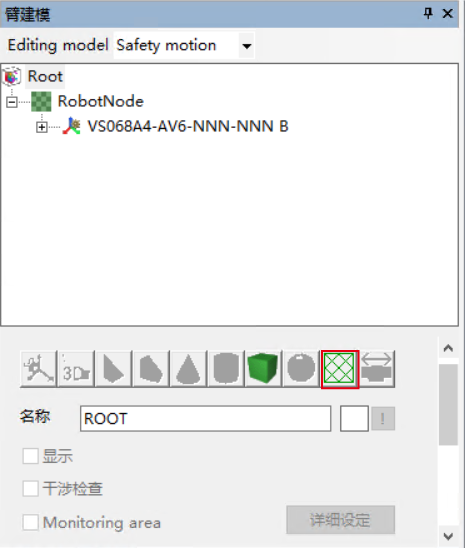
利用WINCAPSIII的臂建模功能创建模型。
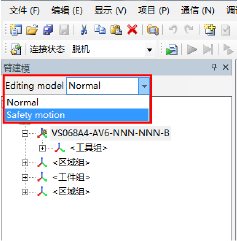
将“编辑模型”切换到“安全动作”。
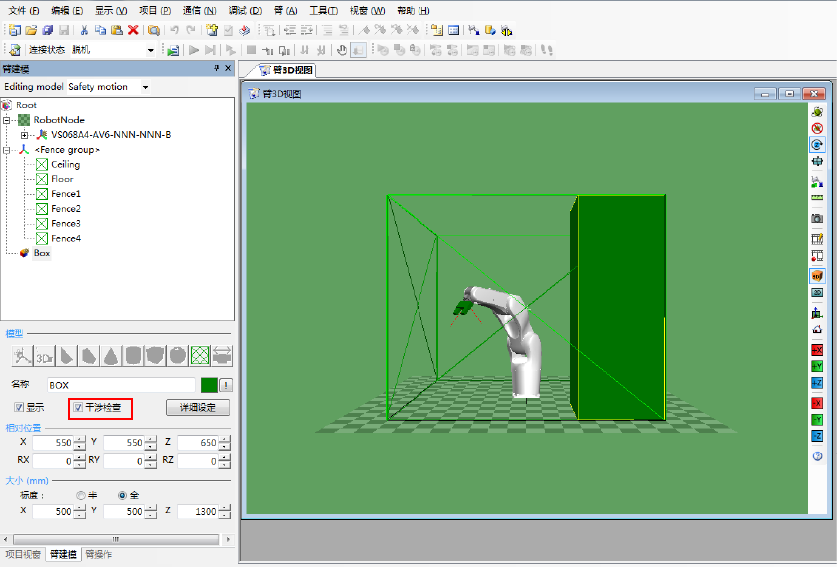
2
选择对象,确认将“干涉检查”设为有效。
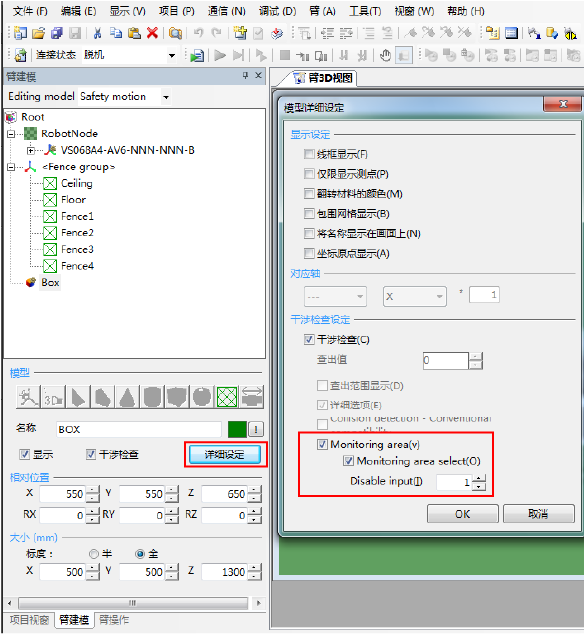
3
从“详细设定”打开“模型详细设定”,设定“干涉检查设定”。
希望执行暂时限制的对象(BOX)时,勾选“监视领域切换”,使用无效输入设定与希望使用的I/O编号相同的编号0~3。
4
希望增加对象(BOX)时,重复进行STEP1至STEP3。
常时限制领域(栅栏模型)的创建步骤
下面说明栅栏模型的创建步骤。
1
利用WINCAPSIII的臂建模功能创建模型。
将“编辑模型”切换到“安全动作”。
2
在对象树上,选择作为基准的对象。
3
单击栅栏的追加按钮。
4
指定栅栏的顶点数(可以认为是“片数”),单击[OK]。

至此,栅栏模型创建完成。
栅栏模型的干涉检查始终有效。
栅栏的位置及大小可以在[相对位置]及[大小(mm)]中变更。

保存
将监视领域的数据转换为可用控制器处理的数据后保存。
操作路径:菜单[机械臂] - [监视领域数据输出(M)]
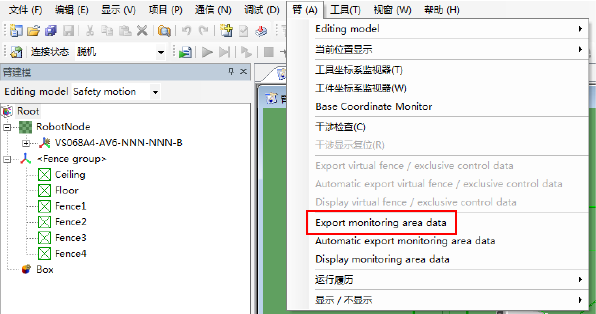
想确认输出的监视领域数据时,可通过菜单[机械臂]-[监视领域数据显示(D)]确认。
如果修正监视模型,请执行[监视领域数据输出(M)]。
如果将[监视领域数据自动输出(A)]设成有效,在项目保护时自动执行[监视领域数据输出(M)],覆盖数据。
ID : 2487