
ID : 2495
对现有功能的影响
不能使用的功能
在安全动作中不能使用以下功能。
- 无法在附加轴上使用的功能
无限旋转、软件限位检查的无效化、自动PosClr、PosClr指令 - 无法在机器人轴上使用的功能
Boundless rotation for Robot、PosClr指令
有可能检测出错误的功能
使用以下功能时,请勿使用SS2输入以及RSM*输入。可以使用速度监视检测错误。
- 传送带跟踪
- 电流限制功能(CurLmt)
- 力量控制功能(ForceCtrl)
- 伺服锁定状态解除(SrvUnLock)
- H系列第3轴(Z)的电流限制功能(ZForce)
- bCap Slave功能
- 协调功能
- 弧形动作(ArchMove)
- 负载推定功能
制约使用方法的功能
变更了使用条件、轴设定等与机器人有关的参数时
安全动作功能除了使用监视所需的数据外,也会用到使用条件等与机器人有关的参数。与机器人有关的参数(详情参照下述的“与机器人有关的参数”)在机器人控制器内按照通常的机器人控制用与安全动作用划分保存位置。通过多功能教导器、小型教导器变更了与机器人有关的参数时,通过WINCAPSIII变更后发给机器人控制器时,通常的机器人控制用参数将被变更,但不被反映到安全动作用参数的保存位置。通过RC8A安全参数工具将监视所需的数据发到安全动作用参数保存位置,也能自动发送与机器人有关的参数。因此,变更了与机器人有关的参数时,请务必通过RC8A安全参数工具发送监视所需的数据,重启机器人控制器。
通过多功能教导器或小型教导器变更了与机器人有关的参数时,请通过WINCAPSIII读出所有的机器人控制器的数据保存后,通过RC8A安全参数工具发送该项目的监视所需的数据,重启机器人控制器。
变更了与机器人有关的参数时,如果不用上述方法将变更反映到安全动作用参数的保存位置,安全动作功能可能动作不正常,因此很危险。也请务必将变更反映到安全动作用参数的保存位置。
与机器人有关的参数
所谓与机器人有关的参数,具体指通过下述操作变更的参数。进行了下述操作时,请务必将变更反映到安全动作用参数的保存位置。
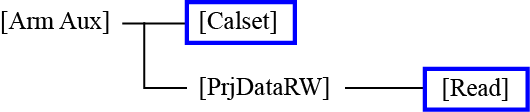
- 多功能教导器
-
通过以下的方框框起来的操作所变更的参数就是与机器人有关的参数。
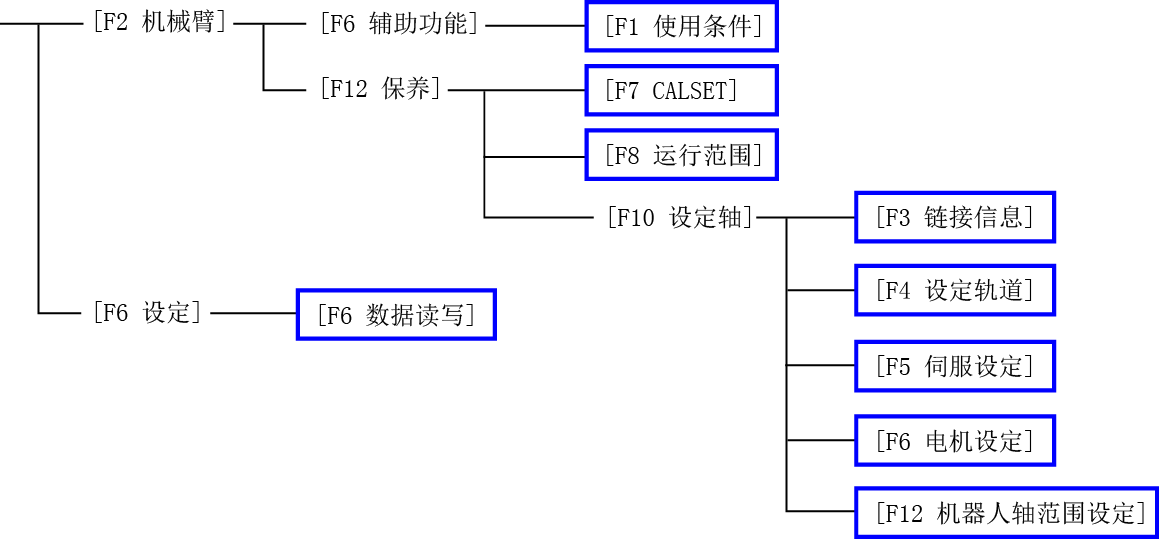
- 小型教导器
-
通过以下的方框框起来的操作所变更的参数就是与机器人有关的参数。
- WINCAPSIII
-
通过以下的操作所变更的参数就是与机器人有关的参数。
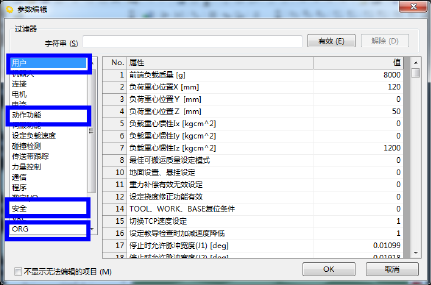
参数 操作路径:[项目(P)]-[参数(T)]
相应的参数:
- 用户
- 动作功能
- 安全
- ORG
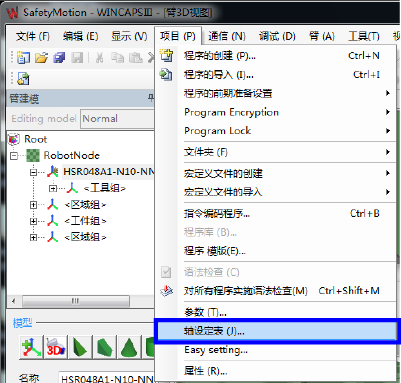
轴设定表 操作路径:[项目(P)]-[轴设定表(J)]
关于工具编号以及工具定义
请确保安全动作的工具定义与PAC程序的工具定义一致。如果不一致,有可能会因安全动作而出错。
建议利用PAC的开头变更成安全动作工具定义的使用方法。
Sub Main
TakeArm Keep = 0
变更成ChangeTool safetyinfo( 1 ) '安全动作识别的工具编号
・
・ '除PAC的开头之外,不使用tool,changetool。
・
End Sub关于自动增益调整及负载推定功能
请将监视功能暂时设成无效后再执行。
步骤如下所示。
1
打开监视无效输入。
2
进行自动增益调整或者自动测量(负载推定功能)。
3
关闭监视无效输入。
关于协调功能
请进行安全动作规格专用的配线。
ID : 2495