
ID : 2609
基准位置确认
功能
确认安全动作当前识别的位置值与预先登录到安全动作的基准位置值一致。
确认在对基准位置确认输入进行OFF(开路)时,基准位置是否一致。如果一致,基准位置确认输出打开,可以进行正确监视的状态。
如果基准位置确认输出关闭,就无法正确监视。
使用条件
| 输入信号 | 基准位置确认输入 |
|---|---|
| 输出信号 | 基准位置确认输出 |
| 监视对象 | - |
| 监视范围设定 | 无 |
| 执行模式 | 手动模式 |
| 功能开始的时机 | 基准位置确认输入变成OFF(开路)时 |
基准位置确认的步骤
1.基准位置的登录
对基准位置的登录步骤进行说明。
初次启动时,基准位置确认输入OFF(开路)时出错。请进行“登录基准位置”,重启控制器。
1
将机器人设成知道各轴角度的位置、姿势。(例如,全角0度)
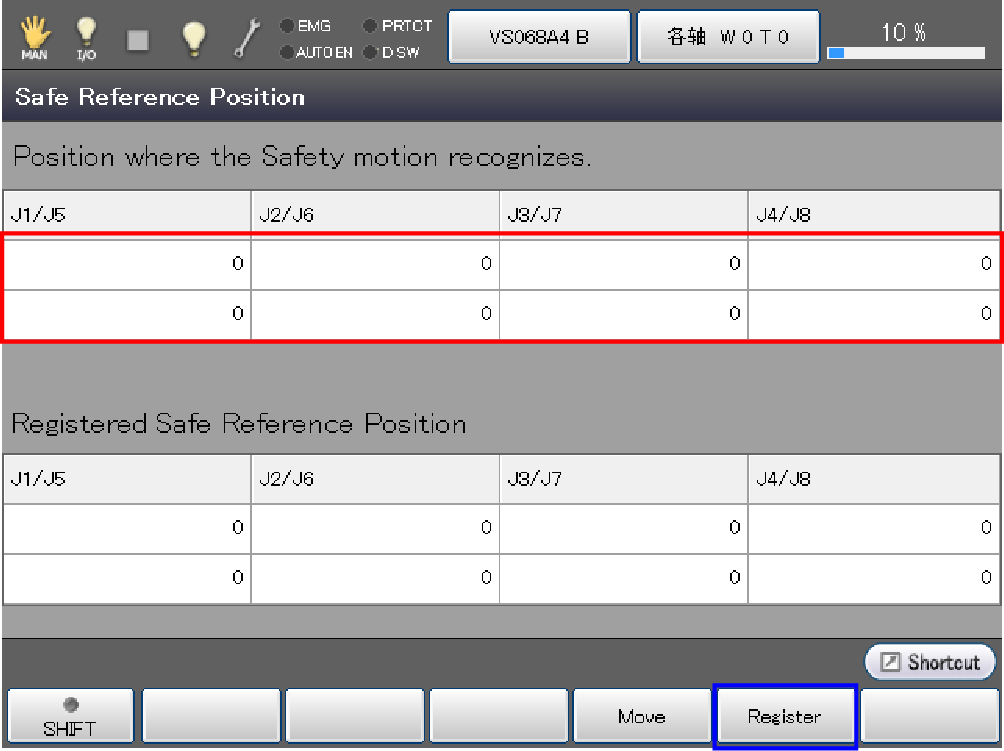
使用多功能教导器打开安全动作的基准位置画面。下图红框部分所显示的值就是安全动作识别的位置。确认该值是否正确。
操作步骤:[F2 机械臂] - [F12 保养] - [F5 安全动作] - [F2 基准位置]
2
将机器人移动到用户规定的基准位置。
最好是将STEP1的位置设成基准位置。但是,由于基准位置在设备化后也会进行确认,因此请设成设备化后也可以移动的位置。
3
按压多功能教导器的[登录]按钮。将安全动作识别的位置作为基准位置登录。
4
使用WINCAPSIII接收登录到控制器的基准位置数据,并保存。
使用WINCAPSIII接收时,请勾选“其他”中的“监视领域数据”。详细步骤请参照WINCAPSIII指南中的“发送接收数据”。
5
启动RC8A安全参数工具,向安全动作发送基准位置数据。
使用RC8A安全参数工具打开保存的项目时,也会一起读入基准位置数据,在发送监视模型时一起向安全动作发送。详细步骤请参照“发送监视数据”。
2.基准位置的确认
针对确认安全动作当前识别的位置值与预先登录到安全动作的基准位置值一致的步骤进行说明。
1
将机器人向基准位置移动。
在手动模式下进行时,在上述安全动作的基准位置画面按压多功能教导器的[移动]按钮。
使用程序进行时,用SafetyInfo指令获取基准位置(索引编号:7)的值,装入移动到该位置的程序。
2
通过外部机器进行基准位置确认输入OFF(开路)。
如果安全动作当前识别的位置值与预先登录到安全动作的基准位置值一致,基准位置确认输出打开。
关于基准位置确认输出
基准位置确认输出打开期间,可以正确监视的状态。
关闭控制器电源,重新打开电源时,该输出也会重新打开。
- 电源关闭时,保存各轴角度。如果保存失败,在下一次接通电源时发生错误0x834A0021“已关闭基准位置确认输出”,请重新执行“基准位置的确认”后移动机器人。
- 如果在关闭控制器电源的状态下变更机器人的位置,重新打开电源时出错,不会打开输出。请重新执行“基准位置的确认”。
- 进行了CALSET时,出错,该输出断开。
需要将CALSET后的参数反映到安全动作,进行“基准位置的确认”。
请按照以下步骤,进行“基准位置的确认”。1.请通过WINCAPSIII接收机器人控制器的全部数据,参照保存WINCAPSIII的项目数据的WINCAPSIII指南的“发送接收数据”。
2.然后,请通过RC8A安全参数工具打开步骤1保存的WINCAPSIII的项目数据,参照向机器人控制器发送“监视所需的数据”的“发送监视数据”。
3.重启机器人控制器。
4.进行“基准位置的确认”。
ID : 2609