
ID : 2489
监视数据的发送
使用WINCAPSIII和RC8A安全参数工具向控制器和安全动作发送监视所需的数据。
步骤如下所示。
发送前准备
通过Ethernet电缆连接安装了WINCAPSIII的PC(以下称作"已安装的PC")和机器人控制器(参照"LAN的连接")。 此时,请将已安装的PC和机器人控制器一对一连接。

已经使用HUB,与其他机器连接时,重新将已安装的PC和机器人控制器一对一连接。在该状态下发送监视数据后,请恢复与其他机器的连接。
使用HUB时的事例
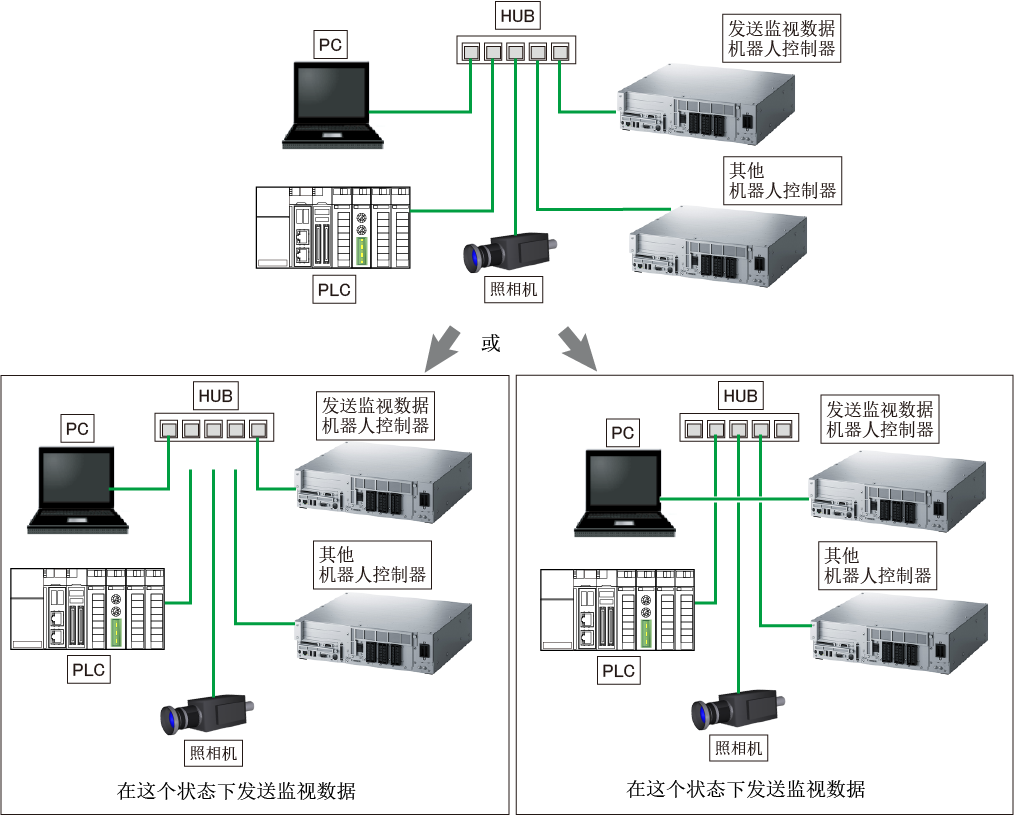
如果已安装的PC和机器人控制器没有一对一连接,监视数据有可能不能正确发送。
通过WINCAPSIII发送
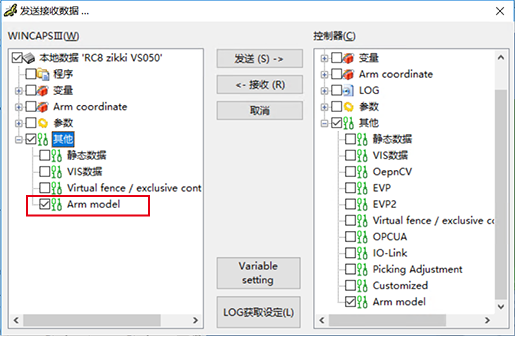
勾选“监视领域数据”,发送给控制器。
详细的设定方法请参照WINCAPSⅢ指南的“与机器人控制器通信”。
但是,请按照上述“发送前准备”的内容进行安装了WINCAPSIII的PC和机器人控制器的连接。
勾选“机械臂模型”后,可以将制作监视领域数据用的模型数据发送至控制器。但是,控制器内的保存空间不足时,不显示机械臂模型的项目。
Ver.2.11.*及更高版本可使用该功能。
利用RC8A安全参数工具发送
1
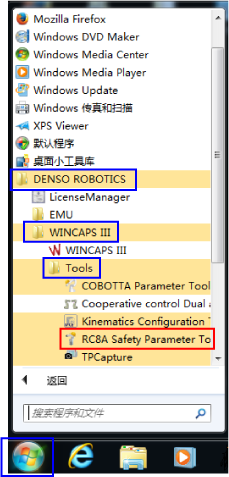
启动RC8A安全参数工具。
操作路径:PC[开始]按钮 - [所有程序] - [DENSO ROBOTICS] - [WINCAPSIII] - [Tools] - [RC8A安全参数工具]
2
使用“程序员”登录。

3
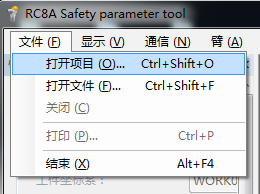
打开用WINCAPSIII创建的项目。
操作路径:[文件] - [打开项目]
打开项目时,利用RC8A安全参数工具检查参数的范围。
4
确认[安全监视参数]以及[领域监视参数]的值是否错误。
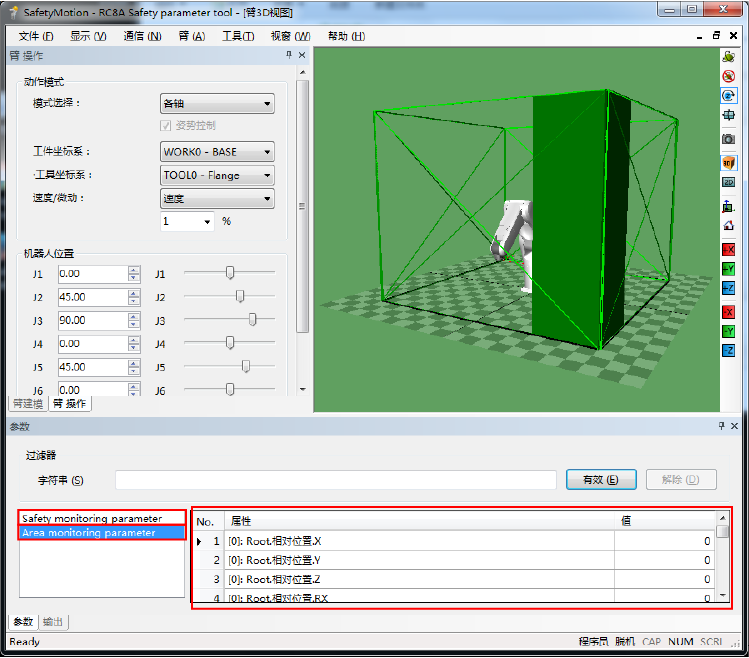
不能用RC8A安全参数工具变更参数。请使用WINCAPSIII进行变更。
5
将监视模型的数据发送给控制器。
操作路径:[通信] - [参数发送]
指定IP地址,按压[发送]按钮。
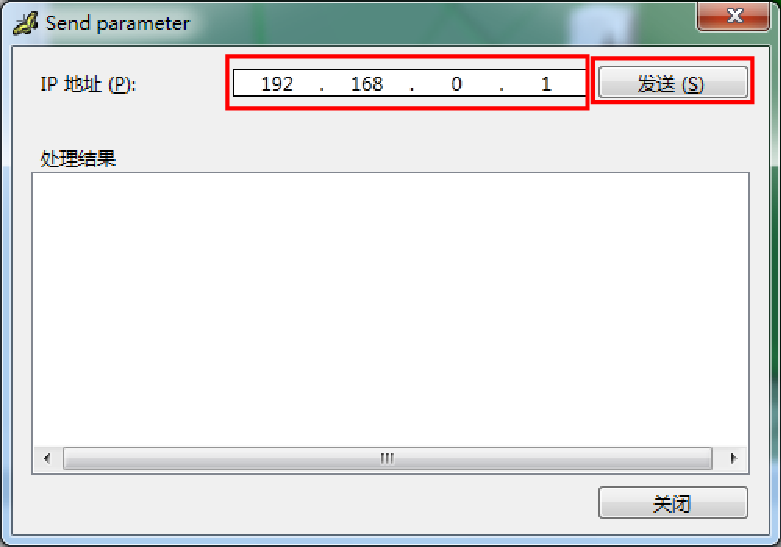
-
按压[发送]按钮,利用RC8A安全参数工具实施以下的内容。
- 参数的发送
- 写入检查
发送参数后,首先从安全动作接收参数。接着,对比接受的参数与发送的参数,检查有无差别。 - 如果发送参数,利用安全参数工具检查参数的范围。
6
如果成功向安全动作写入参数,将显示“请关闭电机。”
如果显示“安全参数发送失败。”,请根据状况进行处理后重新发送。
| 讯息 | 不良理由 |
|---|---|
| “不能连接到控制器。” | 与控制器的连接失败时 |
| “不能和Ver.2.1.0以下的控制器通信。” | 控制器的版本低于2.1.0时 |
| “不是RC8A控制器。” | 控制器不是RC8A时 |
| “机械手类型不同。” | 控制器的机器人类型不同时 |
| “通信中发生了无法预期的错误。” | 通信中有异常时 |
7
发送完成后,发出提示安全参数更新完成的错误讯息。
下图是发生错误时在多功能教导器上显示的错误讯息视窗。

发生该错误时的错误讯息视窗上显示安全参数ID。
安全参数ID是指根据安全参数的设定值而变化的固有的值。详细内容请参照“这里”。
机器人控制器的软件版本低于2.15.* 时,错误讯息视窗中不显示安全参数ID。
8
请重新启动机器人控制器,以安全的速度使机器人动作,确认安全功能是否按照意图动作。当安全功能不按照意图动作时,请修订参数。
发送参数后,在重新启动机器人控制器前,已发送的参数不会被反映到机器人控制器中。发送参数后,请务必重新启动机械手控制器。
ID : 2489