
ID : 4410
收发数据
与机器人控制器间进行数据的收发。
发送接收数据时,请勿切断控制器电源。
在各项目中,根据WINCAPSIII的设定及机器人控制器的规格不同,有些项目不会在接收发送数据一览中显示。
发送步骤
1
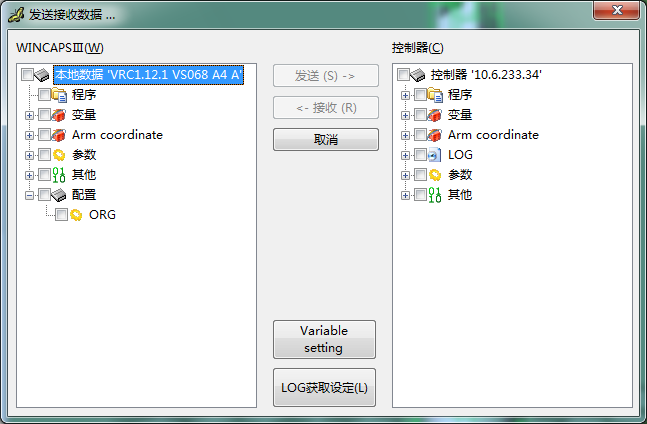
从“通信”菜单中选择“发送接收数据”。
显示“发送接收数据”对话框。
- 变量发送接收设定
选择变量、机械臂坐标系的收发对象。在默认(通常)情况下,收发全部的值、用途、宏名。 - log获取设定
选择要获取的log数据的领域。在默认(通常)情况下,从保存用存储器获取错误log和操作log,从操作用存储器获取其它log。为防止误操作,上述设定值仅在当次收发时有效。下次收发时将返回默认值,因此,必要时每次设定。
2
选择收发的数据。
发送数据时,在“WINCAPSIII”侧接收数据时,请勾选“控制器”侧的选框。
可同时选择多个数据。
3
单击“发送”按钮或“接收”按钮。
显示确认对话框。
4
单击“是”按钮。
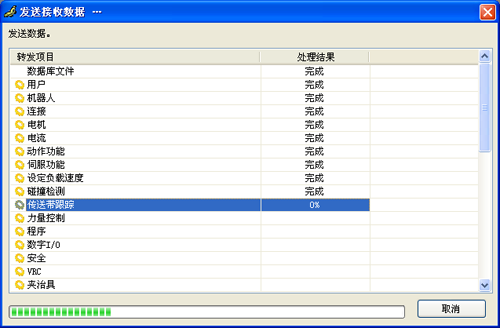
开始收发数据。
收发数据中在画面上显示进展状况。
接收来自机器人控制器的数据后,将更新WINCAPSIII项目内的数据。由于已覆盖程序,因此,修正程序时,将放弃编辑的内容。
包含CALSET值的数据发送方法
机械臂参数中包含决定机器人固有位置数据的“CALSET值”。WINCAPSIII从机器人控制器接收机械臂参数时包含CALSET值,但是,从WINCAPSIII向机器人控制器发送机械臂参数时不包含ALSET值,以防止替换。
想向机器人控制器发送包含CALSET值的机械臂参数数据时,请按照以下要求进行。
发送准备
准备通过WINCAPSIII的数据收发功能向机械手控制器发送机械臂数据。
单击[工具]-[选项]-[通信]标签。勾选[发送选项]内的[发送许可-CALSET值],单击[OK]。

由于可能向机器人发送错误的数据,示教位置错误,常规作业时,请不勾选[发送选项]内的[发送许可-CALSET值]。
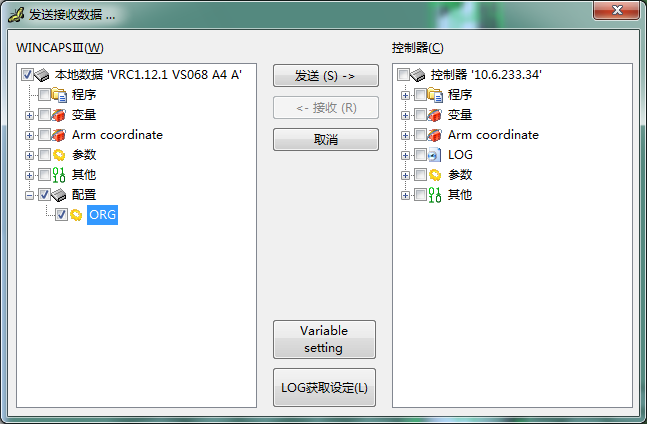
发送步骤
勾选WINCAPSIII侧的[参数]-[机械臂参数]和[配置]-[ORG],按照标准的发送步骤发送。
ID : 4410