
ID : 2480
Safe Stop 2 (SS2)
功能
减速停止机器人,之后电机电源保持打开的功能。
相当于IEC60204-1的停止范畴2。
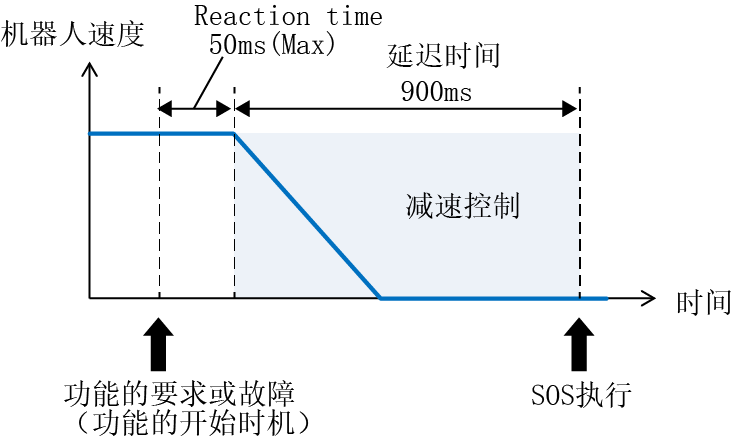
安全动作输入的“SS2”输入关闭后,机器人开始减速。监视各轴的编码器值变化,如果变化量(停止判定值)在设定值以下,或是过了一定时间(最大减速时间),就会切换成SOS功能。
使用条件
| 输入信号 | SS2输入 |
|---|---|
| 输出信号 | 无 |
| 监视对象 | 机器人各轴,附加轴 |
| 监视范围设定 | 判断为停止的各轴最大编码器值 |
| Reaction time | 50ms(Max) |
| Process Safety Time (PST) | 950ms |
| 执行模式 | 自动模式 |
| 功能的开始时机 | SS2输入关闭时开始 |
ID : 2480