
ID : 1987
世界坐标
功能概要
世界坐标是以用户指定的原点为基准的坐标系,可在通用坐标系中指定多台机器人的位置。
通过将世界坐标的原点作为设备原点,可指定各机器人在设备坐标中的位置。
| 以往 | 在将机器人底座作为原点的坐标系中指定位置。区域、工件等也均为机器人底座基准
|
|---|---|
| 世界坐标 | 在以用户指定的原点为基准的坐标系中指定位置。区域、工件等也均为世界坐标基准(工具除外)
|


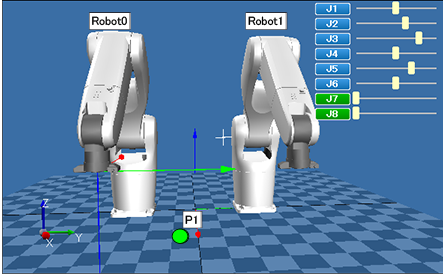
在下图的示例中,无论是Robot0还是Robot1,世界坐标系的P1值均相同,因此,编程较容易。
程序示例
Robot0.Move P, P1 '机器人0移至P1
Robot1.Move P, P1 '机器人1移至P1
协调功能时的世界坐标
使用协调功能时,首先,需要对所有机器人提前指定从世界坐标系观察的基准位置(基准坐标)。
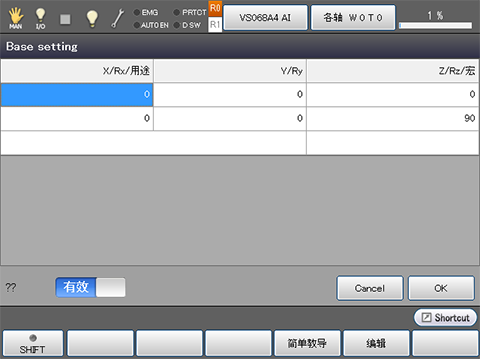
通过多功能教导器指定基准坐标
世界坐标上的基准坐标设定方法有“直接输入”和“简单教导”两种。
| 直接输入 | 直接指定(X,Y,Z,Rx,Ry,Rz)。
|
|---|---|
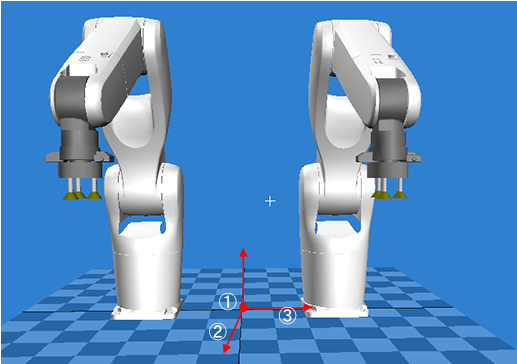
| 简单教导 | 对于基准进行下述3点教导,自动计算基准坐标。 (1)坐标原点 (2)X轴方向 (3)XY平面的点
|
程序中的基准坐标指定
使用Base指令。
ID : 1987