
ID : 1982
概要
协调功能是一种可使多台机器人联动的功能,可搬运和组装长条状物体和柔软物体。
此功能对Ver.1.9.*及更高版本有效。
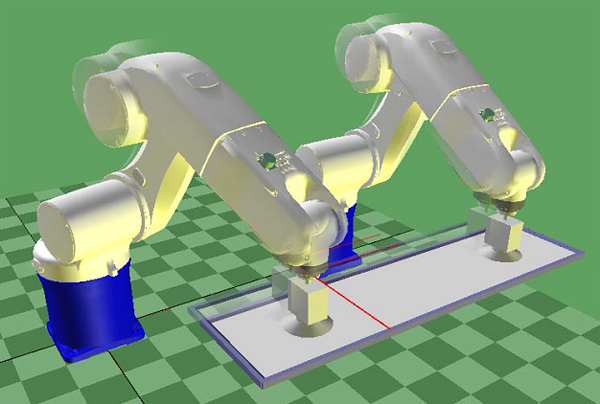
下图为使用2台机器人搬运长条状物体的示例。2台机器人保持工具前端的位置关系并进行动作,不会使长条状物体变形就能搬运。
使用该功能时,在1台控制器中创建并执行多台机器人的程序,另外,由于进行位置教导时使用多台机器人的通用坐标,因此可以便捷地进行编程和各种设定。
关于执行该功能的系统构成,请参照“系统构成”。
具体有以下的特点:
- 能够同步动作
- 使多台机器人动作时,可对准动作开始与动作结束的时机。将该动作叫做同步动作。详细内容请参照“同步动作”。
- 能够协调动作
- 可使多台机器人在保持工具前端的位置关系的情况下同步动作。将该动作叫做协调动作。详细内容请参照“协调动作”。
- 可用世界坐标系示教
- 利用协调功能,多台机器人使用公用的坐标系,可由多台机器人共享示教位置。由此可简单地进行示教、示教位置的管理。
将各机器人公用的坐标系叫做世界坐标系。详细内容请参照“世界坐标系”。 - 可统一管理多台机器人的运动
- 可用1台机器人控制器管理多台机器人的运动,易于把握各机器人的动作流程,易于编写程序。
协调功能也可不使用协调动作、同步动作,仅仅用于1台机器人控制器管理多台机器人的运动的目的。详细内容请参照“多机器人”。
ID : 1982