
ID : 1985
协调动作
功能概要
多台机器人在保持工具前端位置关系的同时进行动作。可简单地实现多台机器人进行搬运的程序。
例:工件搬运动作
以下为假设使用2台机器人搬运板状工件时,执行倾斜工件动作的情况。
| 在右图中,假设使左边的机器人动作后,也要让右边的机器人随之动作。此时,将左边的机器人叫做“前导者”,将右边的机器人叫做“跟随者”。 | 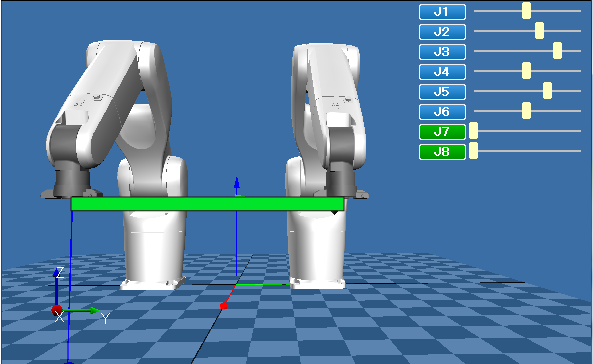 |
| 将前导者的前端位置朝下移动,也扭转角度试一试。 | 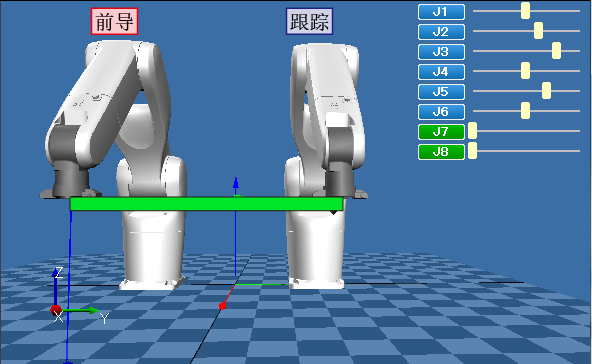 |
| 跟随者也跟随前导者动作。 | 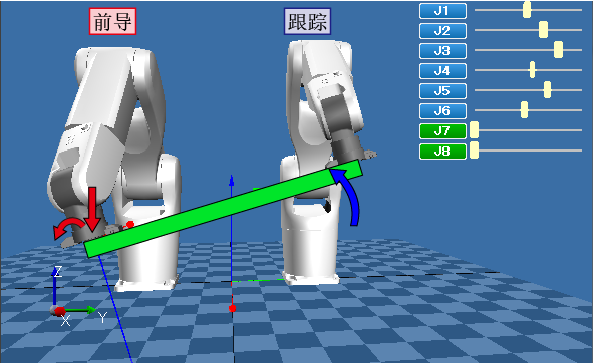 |
如此一来,决定作为前导者的机器人,使前导者动作,跟随者也联动动作。这意味着编写机器人程序时,只需编写前导者的动作,就可连同跟随者一起编程。
另外,改变充当前导者的机器人每个动作时,示教也容易。此时,在机器人程序中,还可改变前导者的每个动作。
关于附加轴
跟随者以与前导者的附加轴相同的轴编号,只动作相同的动作量。
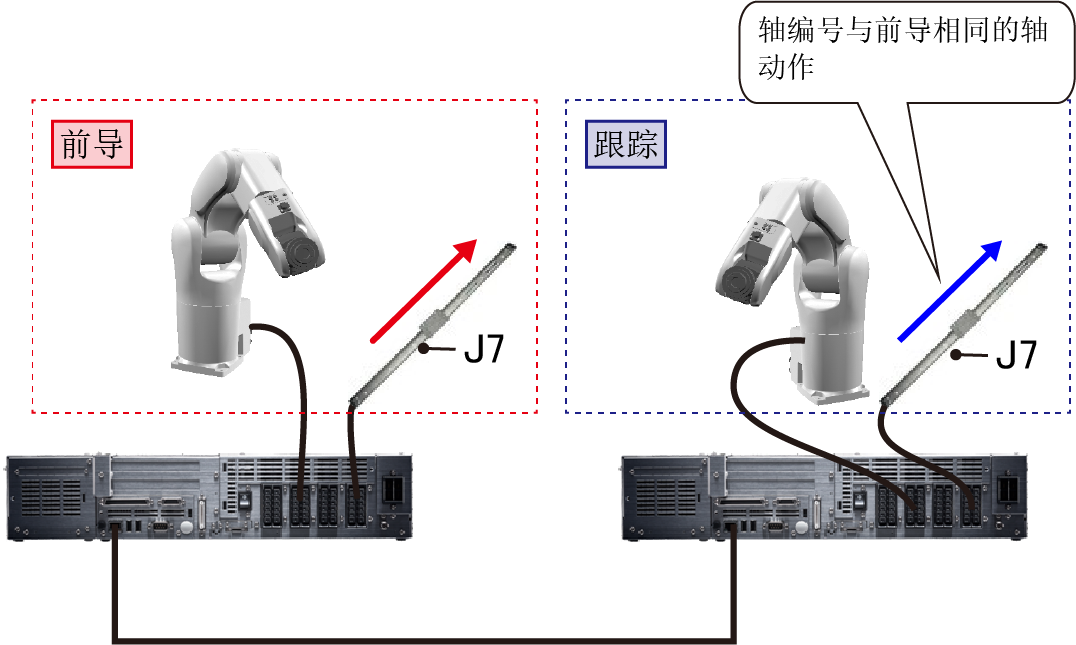
仅动作量和动作时间相同。实际动作取决于用户的设定和安装情况。
编程
使用动作选项中的SyncMove。
ID : 1985