文字大小
<< 向前 下一页 >>
ID : 1986
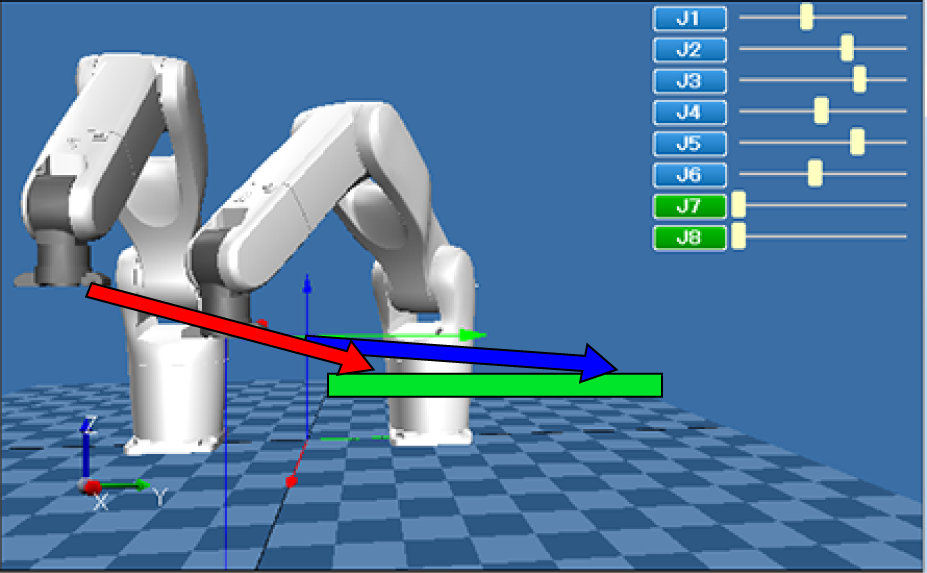
多台机器人同时进行不同动作。时间同步可简单地实现所需作业。
以下为假设从接近状态向下一作业点移动且未发生碰撞的情况。
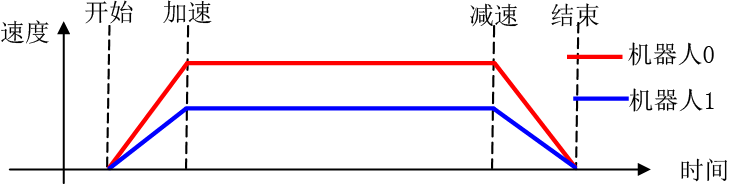
在不同的控制器之间,需要进行使下述时间同步的编程,如果要求的操作精度较高,则编程会更复杂。
由于同时自动进行动作,因此用户无需追加使时间同步的编程,编程难度低。
使用SyncTime指令。