
ID : 1983
系统构成
下图表示协调功能的系统构成图。
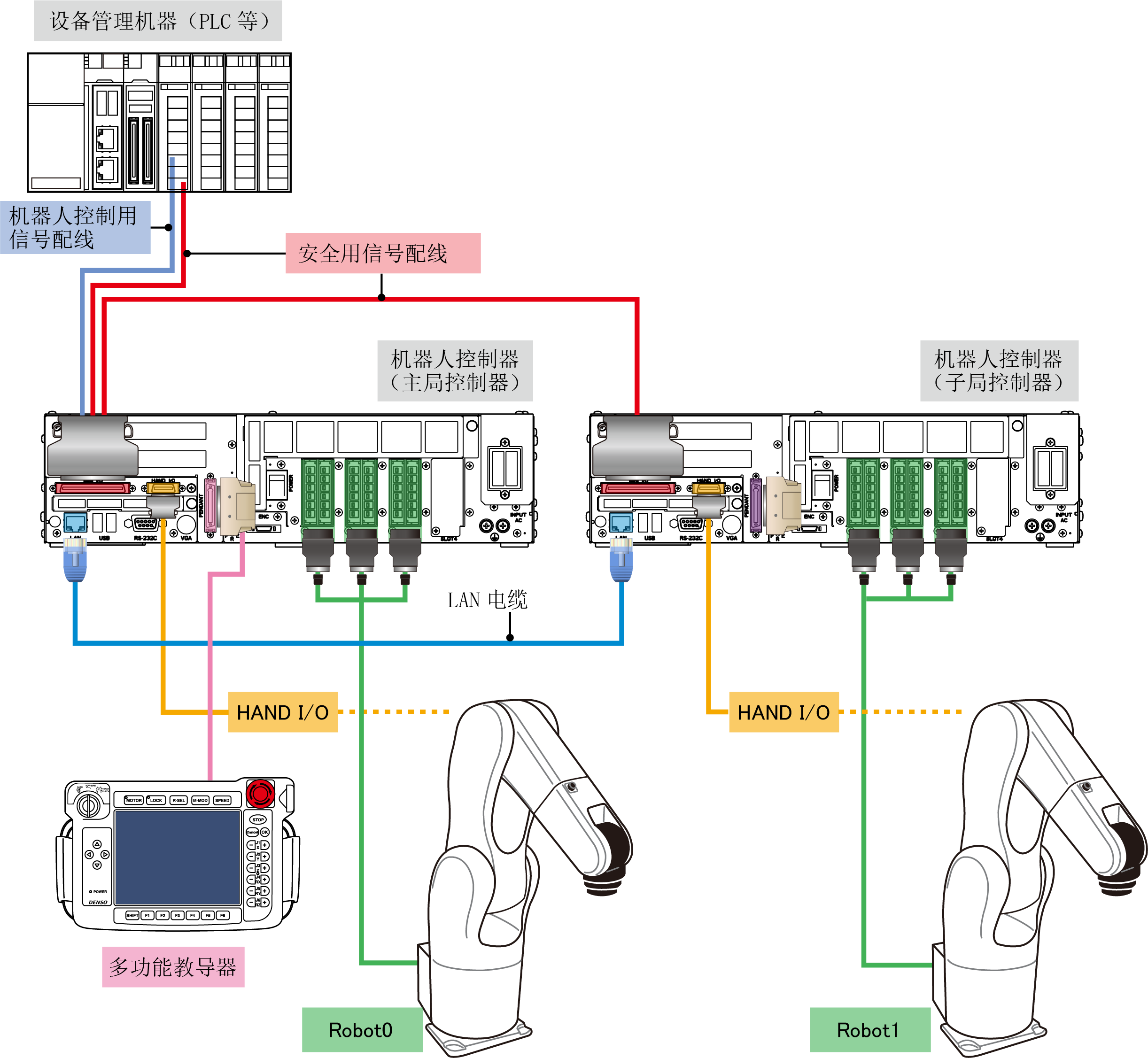
- 主局控制器
- 在控制联动的机器人的机器人控制器中,将配线连接设备管理机器与机器人控制信号的机器人控制器叫做主局控制器。
主局控制器管理联动的机器人的动作。因此,设备管理机器只对主局控制器下达机器人的动作指示,就能使多台机器人联动动作。 - 子局控制器
- 在控制联动的机器人的机器人控制器中,将主局控制器以外的机器人控制器叫做子局控制器。遵照主局控制器发出的指示,控制机器人(例如上图的Robot1)。
- Robot0、Robot1
- 为联动的机器人分配“Robot0”、“Robot1”等的机器人名称。根据连接的机器人控制器,决定机器人名称。
连接到主局控制器的机器人 Robot0 连接到子局控制器的机器人 Robot1~Robot3
机器人名称也用于在机器人程序中识别要控制的机器人。 - LAN电缆
- 用LAN电缆将控制联动的机器人的机器人控制器之间连接起来。通过LAN电缆互通信息,联动动作。
通信方法有利用Ethernet的方法和并用Ethernet与EtherCAT的方法。
并用Ethernet与EtherCAT时,需要作为选件的EtherCAT主局板和EtherCAT子局板,但是可以更高精度联动。 - 安全用信号
- 是指机器人控制器的专用输入输出信号中的紧急停止信号、自动允许信号等与安全有关的信号。这些不是向机器人下达动作指示,而是在即将进入危险的状态时,用于停止机器人的信号。因此,需要连接到所有机器人控制器。
- 机器人控制用信号
- 这是机器人控制器的专用输入输出信号中,安全用信号以外的信号。这些是向机器人下达动作指示的信号,配线只接在主局控制器上。在上图中,虽然配线接在Mini I/O上,但是使用选件板的DeviceNet子局板、CC-Link远程装置板等,可通过各种现场网络向机器人下达动作指示。
- HAND I/O
- 用于控制安装在各机器人上的夹治具、传感器。从主局控制器控制子局控制器的HAND I/O。
- 多功能教导器
- 只安装在主局控制器上。也可通过安装在主局控制器上的多功能教导器,操作接在子局控制器上的机器人。
请在子局控制器上安装虚设连接器。如果不安装虚设连接器,接在子局控制器上的机器人不动作。
在协调功能中不能使用小型教导器。
有关连接方法的详细内容,请参照“系统设计步骤”。
ID : 1983