
ID : 1745
区域的显示、设定
操作路径:[F2 机械臂]-[F6 辅助功能]-[F5 区域]
进行区域的设定。
最多可登录32个区域。
主要用于设定进行机器人和其它设备之间干扰检查的空间。
如果按压[F5 区域],则显示以下[设定区域]视窗。
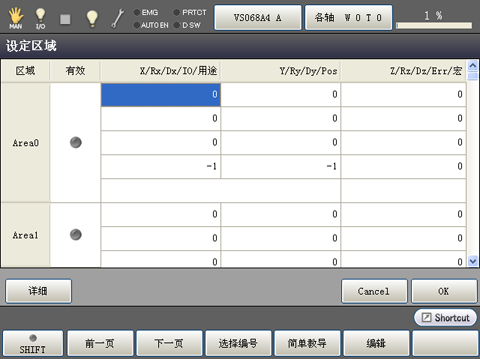
可设定以下项目。选择相应的单元格,按压[F5 编辑]按钮后,可设定各项目。(“有效”除外)
| 单元格 | 设定内容 |
|---|---|
| 有效 | 切换区域功能的有效/无效。 区域功能无效时,指示器变为灰色,有效时则变为绿色。 无效时选择单元格后,打开有效设定的画面,有效时选择单元格后,打开无效设定的画面。按压“OK”后切换状态,按压[Cancel]后保持原状态。 |
| X、Y、Z、Rx、Ry、Rz | 指定区域中心点的位置和旋转(倾斜)。 对应Area指令的“中心”。 |
| DX、Dy、Dz | 指定区域的大小。输入区域中心至最大点间的矢量的各要素。 对应Area指令的“大小”。 |
| IO | 指定检测时信号输出的I/O端口编号。不输出I/O时,指定为“-1”。无法指定不存在的端口编号或无法输出输出信号的I/O端口编号。 对应Area指令的“I/O编号”。 |
| Pos | 指定保存检测位置时的位置型全局变量的索引编号。不保存检测位置时,指定为“-1”。 对应Area指令的“保存变量编号”。 |
| Err | 指定检测方法和错误输出。 按压[F5 编辑]按钮显示选择画面后,选择相应的选项,并按下[OK]按钮。关于选项,请参照功能指南的“区域检测时错误检测的设定”。 对应Area指令的“错误检测设定”。 |
| 功能键以外的键 | |
|---|---|
| [详细] |
显示[区域详细设定]视窗。 |
| 可使用的功能键 | |
|---|---|
| [F1 前一页] | 移至当前显示的区域的上一页。 |
| [F2 下一页] | 移至当前显示的区域的下一页。 |
| [F3 选择编号] |
显示数字键。 使用数字键输入要选择的区域编号,并按[OK],显示指定编号的区域。 |
| [F4 简单教导] | 通过指定1个工件坐标和2处机器人教导并登录的位置坐标(P型变量),对区域坐标进行设定。 |
| [F5 编辑] |
选择需要变更的区域编号和坐标要素,按压[编辑],则显示数字键。 使用数字键输入要设定的值,按压数字键上的[OK]变更值。 |
| [F7 详细] |
显示[区域详细设定]视窗。 进行区域检测的相关设定。 |
ID : 1745
- 本页相关信息
- 通过简单教导进行区域坐标的设定
- 区域详细设定的显示、变更