
ID : 1746
通过简单教导进行区域坐标的设定
操作路径:[F2 机械臂]-[F6 辅助功能]-[F5 区域]-[F4 简单教导]
对机器人进行2点教导,登录位置坐标(P型变量)。对使用登录位置坐标数据和一个工件坐标数据的区域坐标进行设定。
如果按压[F4 简单教导],则显示以下[根据2点的教导设定区域坐标系]视窗。
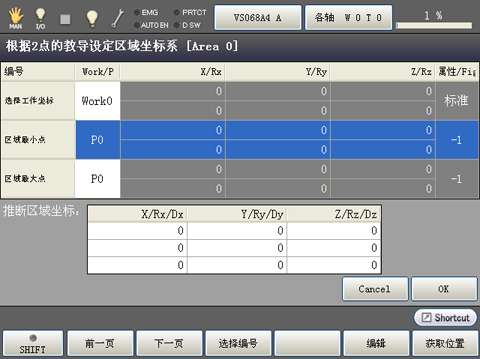
登录工件坐标数据和P型变量后,会自动计算“推断区域坐标”的坐标值。 登录工件坐标和P型变量全部结束并且“推断区域坐标”的值确定后,按压[OK],0号区域坐标中将反映结果坐标。
| 可使用的功能键 | |
|---|---|
| [F1 前一页] | 显示当前显示的由2点教导进行设定的区域坐标系设定列表的上一页。 |
| [F2 下一页] | 显示当前显示的由2点教导进行设定的区域坐标系设定列表的下一页。 |
| [F3 选择编号] |
显示数字键。 使用数字键输入要选择的登录点编号,并按压[OK],则选择指定编号的登录点。 所选择的登录点反衬显示。 |
| [F5 编辑] |
显示数字键。 如果使用数字键输入登录的工件坐标编号或P型变量的编号,并按压数字键上的[OK],则登录指定工件坐标或P型变量的坐标。 |
| [F6 获取位置] |
获取位置坐标(P型变量)的当前位置。 选择登录的编号、位置坐标(P型变量),按压[OK],则可获取当前位置。 |
仅在选择[区域最小点]和[区域最大点]时显示[F6 获取位置]。
ID : 1746