
ID : 1731
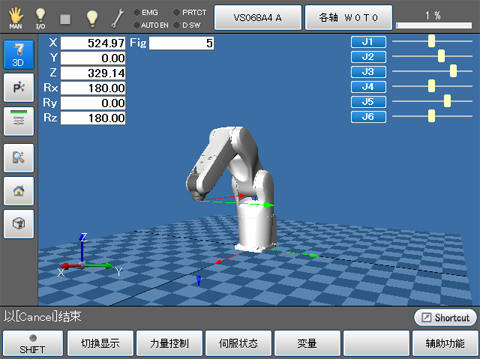
机器人的当前位置信息和3D图像的显示
操作路径:基本画面-[F2 机械臂]
显示机器人的当前位置信息。
| 功能键以外的键 | |
|---|---|

|
显示机器锁定时机器人的3D图像。 按压3D按钮时,按钮的蓝色灯亮起。 |

|
变更机器人当前位置信息的显示方法。 可选择的显示包括“P型显示”、“J型显示”、“T型显示”、“无显示”4种,每次按压按钮均进行切换。 |

|
节线显示各轴的位置信息。 每次按压按钮可切换显示/不显示。 |

|
指定使用漫步旋钮变更3D图像显示方向时的旋转方向。 并且,如果选择放大器,则通过旋转漫步旋钮可放大/缩小3D图像。每次按压键,即可切换横向旋转、纵向旋转、放大/缩小。 |

|
变更3D图像的视点。 每次按压按钮,则按照默认→正面→上→右侧→默认的顺序显示。 |

|
变更3D图像的视点。 按压按钮后将移动视点,可观察机器人整体。(Ver.1.8.*或更高版本) |
| 可使用的功能键 | |
|---|---|
| [F1 切换显示] |
变更机器人当前位置信息的显示方法。 可选择的显示包括“P型显示”、“J型显示”、“T型显示”、“无显示”4种,每次按压按钮均进行切换。 |
| [F2 力量控制] | 设定力量控制功能(依从功能)。 |
| [F3 伺服状态] |
显示各轴的伺服状态。 并且,可显示控制Log或伺服Log的获取、各轴的预计载荷率。 |
| [F4 变量] | 显示“变量画面”。 |
| [F6 辅助功能] |
显示[机械臂辅助功能]视窗。 进行机械臂相关设定的确认、变更。 |
| [F7 返回原点] | 进行原点复位向导功能相关设定的确认、变更。 |
| [F12 保养] | 显示各轴设定相关的菜单。 |
无效的机器人类型不显示力量控制功能(依从功能)按钮。
ID : 1731