
ID : 1747
区域详细设定的显示、变更
操作路径:[F2 机械臂]-[F6 辅助功能]-[F5 区域]-[F7 详细]
进行区域检测功能相关的设定。
如果按压[F7 详细],则显示以下[区域 详细设定]视窗。
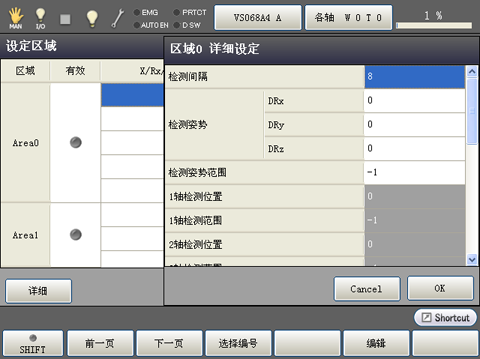
| 项目 | 内容 |
|---|---|
| 检测间隔 | 从选项中选择检测间隔时间[ms]。 |
| 检测姿势 | 除位置外,需要将姿势也作为检测对象时,使用X、Y、Z方向的角度(deg)指定姿势,设定下面的检测姿势范围。 |
| 检测姿势范围 |
指定检测姿势设定值的允许值。 允许值可指定为正数或者负数。 |
| *轴检测位置 | 指定附加轴的区域中心位置。 |
| *轴检测范围 | 指定附加轴区域中心位置的正方向的区域大小。负方向也将自动设定为相同大小。 |
设定机器人轴和附加轴的区域时,作为整体的区域内外的判断如下所示。
- 机器人轴和所有附加轴均位于区域内时,判断为区域内
- 除上述情况以外,判断为区域外
| 可使用的功能键 | |
|---|---|
| [F1 前一页] | 移至当前显示的设定项目的上一页。 |
| [F2 下一页] | 移至当前显示的设定项目的下一页。 |
| [F3 选择编号] |
显示数字键。 使用数字键,输入要显示的设定项目的行编号,并按压[OK],则显示并选择指定行编号的设定项目。 |
| [F5 编辑] |
选择要变更的设定项目后,如果按压[编辑],则显示数字键。 使用数字键输入要设定的值,按压数字键上的[OK]变更值。 |
ID : 1747