
ID : 1942
与工件坐标系动作的差异
手动操作机器人的时候,如果在动作模式上选择“TOOL”,则在工具坐标系上动作。如果选择“X-Y”模式,则在工件坐标系上动作。
手动模式下的[X]、[Y]、[Z]键操作
下图表示操作[X]、[Y]、[Z]键时2个坐标系的动作差异。
| X-Y模式(工件坐标系) | TOOL模式(工具坐标系) | ||
|---|---|---|---|
| X± | 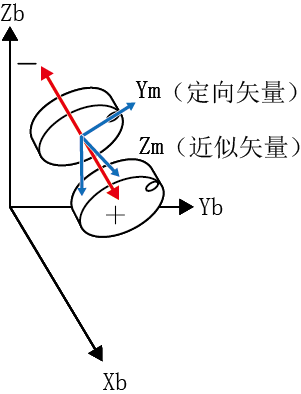 |
X± | 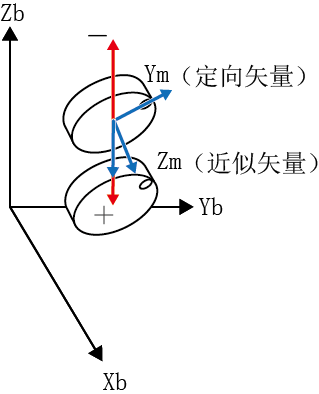 |
| Y± | 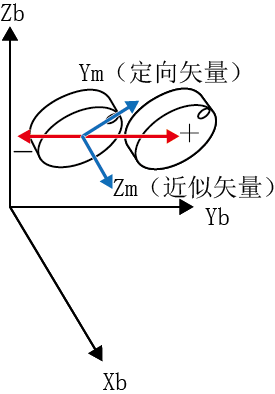 |
Y± | 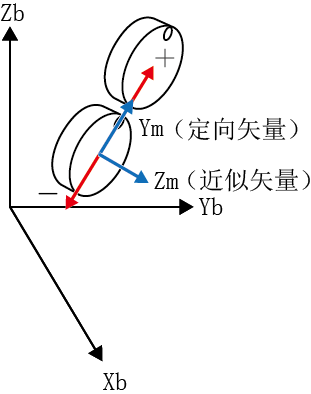 |
| Z± | 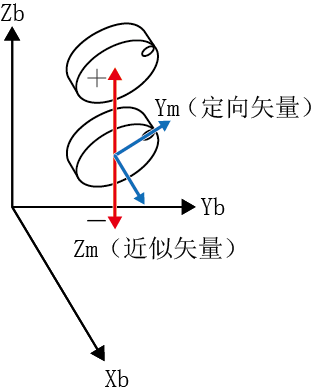 |
Z± | 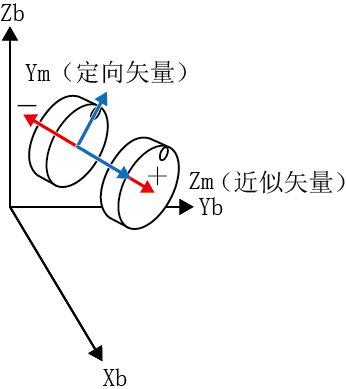 |
手动模式下的[RX]、[RY]、[RZ]键操作
下图表示操作[RX]、[RY]、[RZ]键时2个坐标系的动作差异。
| X-Y模式(工件坐标系) | TOOL模式(工具坐标系) | ||
|---|---|---|---|
| RX± | 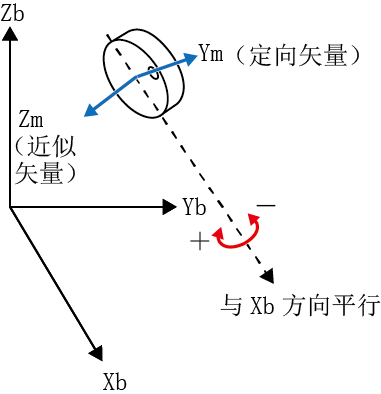 |
RX± | 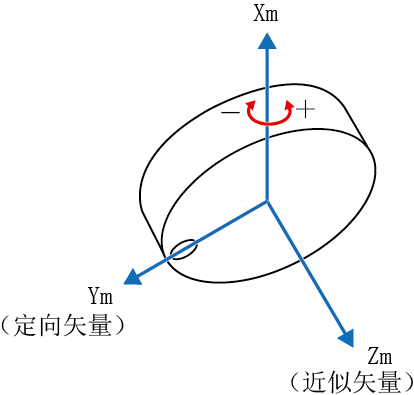 |
| RY± | 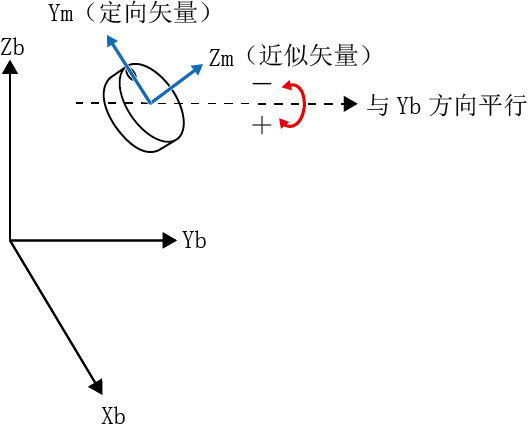 |
RY± | 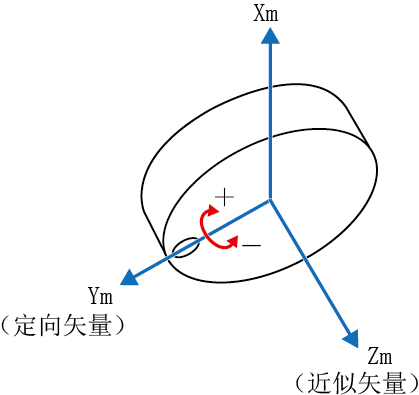 |
| RZ± | 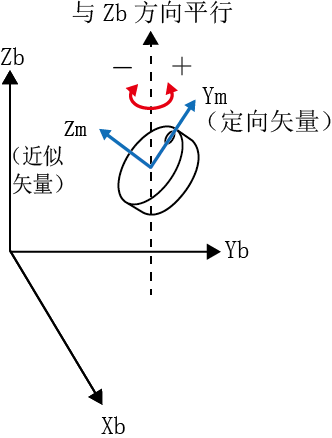 |
RZ± | 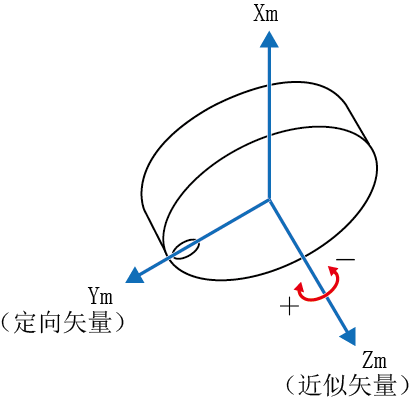 |
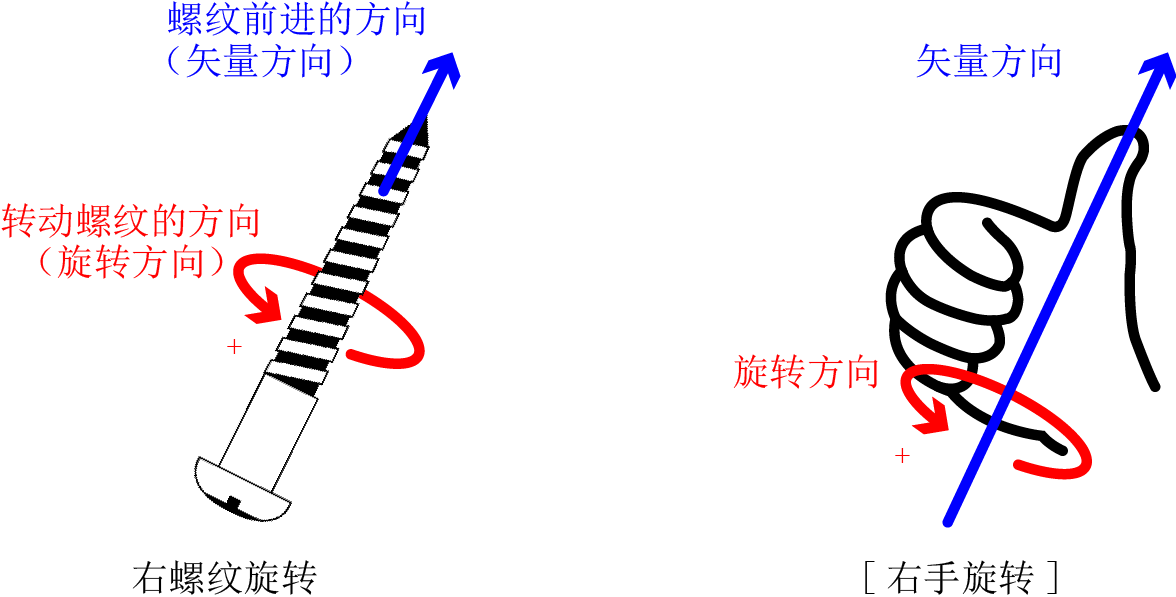
关于+-符号,相对矢量方向的“右螺纹旋转”为+。
“右螺纹旋转”依据的是将螺钉插进板时,朝右转动螺钉前进的原理。在这里,插进螺钉的方向是矢量方向,向右转动螺钉的方向是旋转方向。
另外,“右螺纹旋转”也可叫“右手旋转”。“右手旋转”是指握紧右手时竖起拇指,拇指朝向的方向是矢量方向,其余手指的方向是旋转方向。
ID : 1942