
ID : 7329
显示、设定碰撞检测功能
操作路径:[F2 机械臂] - [F6 辅助功能] - [F2 碰撞/干涉] - [F1 碰撞检测]
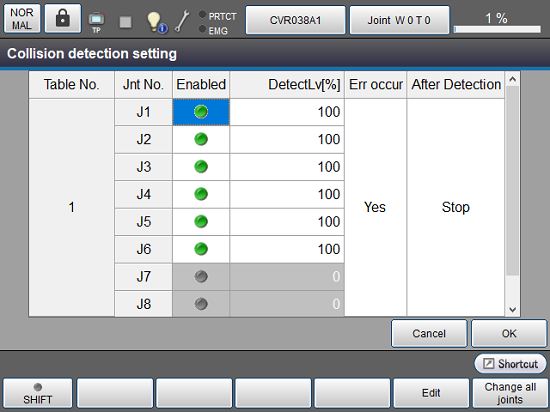
按轴设定碰撞检测功能的有效/无效、检测级别。此外,设定检测到碰撞时错误是否发生错误。
按下[F1 碰撞检测],显示如下[设定碰撞检测]窗口。
有关操作步骤,请参照功能指南碰撞检测功能中的“实施步骤”。
| 可使用的功能键 | ||
|---|---|---|
| [F5 编辑] | 选择项目按下编辑按钮,即可设定项目。 按下[设定碰撞检测]窗口的[OK],确定设定的值。 |
|
| 有效 | 按轴设定碰撞检测功能有效/无效。 按下[编辑]按钮,就会显示是否切换状态的确认讯息。 按下[OK],更改值。 有关详细内容,请参照功能指南碰撞检测功能中的“有效/无效设定”。 |
|
检测级别[%] |
设定每轴的检测级别。 按下[编辑]按钮,显示数字键。 使用数字键输入值,按压数字键上的[OK]变更值。 有关详细内容,请参照功能指南碰撞检测功能中的 “检测级别的设定” 。 |
|
错误发生 |
设定检测到碰撞时是否发生错误。 按下[编辑]按钮,显示设定切换的窗口。 选择是/否,按下[OK],即设定值。 有关详细内容,请参照功能指南碰撞检测功能中的“碰撞检测时有无发生错误的设定”。 |
|
碰撞检测后 |
设定在碰撞检测后在动作轨道上停止或者是进入轴自由状态后再停止。 按下[编辑]按钮,显示设定切换的窗口。 选择停止/轴自由,按下[OK],即设定值。 有关详细内容,请参照功能指南碰撞检测功能中的“碰撞检测时的轴自由设定”。 |
|
| [F6 切换所有轴] | 显示系统消息后选择[碰撞检测]的[ON]或[OFF]后按压[OK]。 [ON]:所有轴变为有效。 |
|
ID : 7329