
ID : 2665
检测到碰撞时的轴自由设定
使用远程TP/虚拟TP或指令,设定碰撞检测时是在动作轨道上停止或者是进入轴自由状态后再停止。关于指令的详细内容,请参照“SetCollisionDetection”。
对减速碰撞损害及防止夹入有效。
Ver.2.9.*及更高版本可使用该设定。
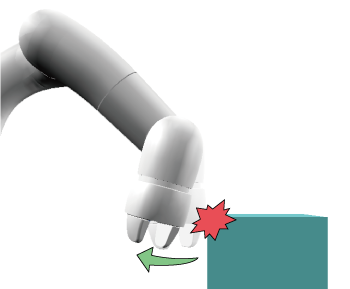
- 轴自由
- 使轴变软,由于外力改变机器人姿势的状态。
注意事项
- 根据碰撞时的动作速度及前端负载质量的设定,COBOTTA在碰撞后有可能会继续移动。另外,与速度设定无关,姿势有可能会因更快的速度而变更。
-
根据碰撞检测时的姿势不同,轴自由造成的姿势变更可能会较小。在这种情况下,与姿势变更较大的情形相比,可能不易于避让碰撞物。
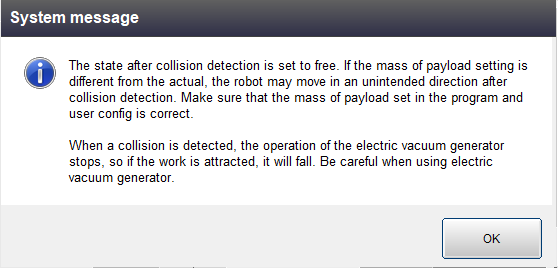
- 如果在使用电动真空发生器时检测到碰撞,电动真空发生器的电机会和轴自由状态结束的同时OFF。如果在吸附工件时关闭电机,工件会掉落,请注意。
功能说明
设定成轴自由时,COBOTTA在碰撞检测时,所有轴都会变成轴自由状态。变成轴自由状态后,COBOTTA的姿势会因碰撞时的碰撞而变更。
之后,如果满足以下条件中的其中一个,即会解除轴自由,连续停止。
- COBOTTA的动作停止。
- 碰撞检测经过1秒。
- 任意一个轴从碰撞位置动作10°以上。
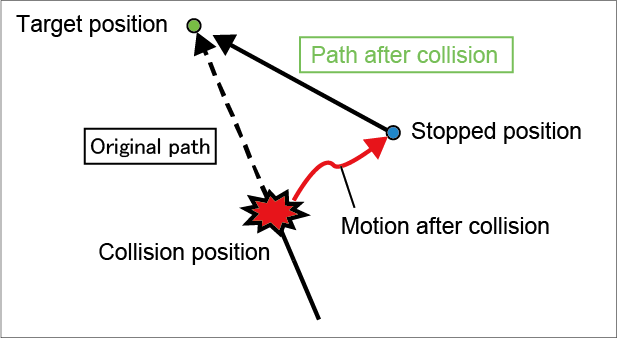
如果在连续停止后启动程序,COBOTTA就会从停止位置向执行的轨道目标位置动作。
但是,在以下条件时则会发生错误,不能连续开始。
| 条件 | 错误 | |
|---|---|---|
| 错误编码 | 内容 | |
从检测位置超出“位置偏离检测机械臂允许范围”移动时 (出厂时所有轴为10°) 位置偏离检测机械臂允许范围设定可通过"使用条件的显示、设定" 进行确认。 |
0x83201412 | 停止位置与动作开始位置不一致。 |
| Move C、Move S、Rotate指令执行中检测到碰撞时 | 0x84201578 | 圆弧或样条运行中检测到碰撞。 |
该设定在以下任一状态下有效。
- 启动PacScript的状态
- 从外部设备获取机器人控制权的状态
除上述情况之外,即使设定成轴自由,也会在动作轨道上停止。例如,从变量画面移动变量时,即使碰撞,也不会变为轴自由。
即使在启动PacScript的状态下,作为特权任务执行时,不会变为轴自由。
设定步骤
表示采用远程TP/虚拟TP操作的设定步骤。
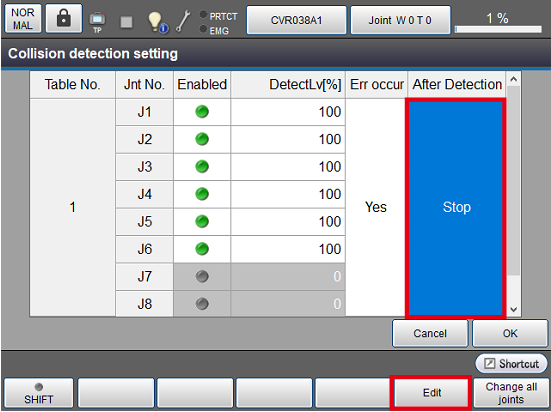
1
在设定碰撞检测画面中选择碰撞检测后的项目并按压[F5 编辑]。
如果将错误发生设定成[不执行],碰撞检测后的项目将不可选择。
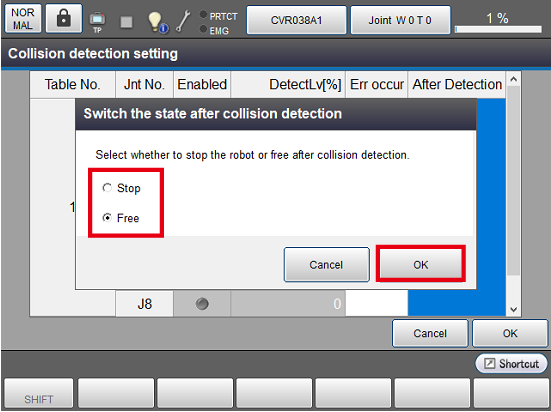
2
显示“切换检测到碰撞后的状态画面”后,选择[停止]或[轴自由],再按压[OK]。
如果按压[Cancel],则不变更设定。
3
确认设定已变更,按[OK]。
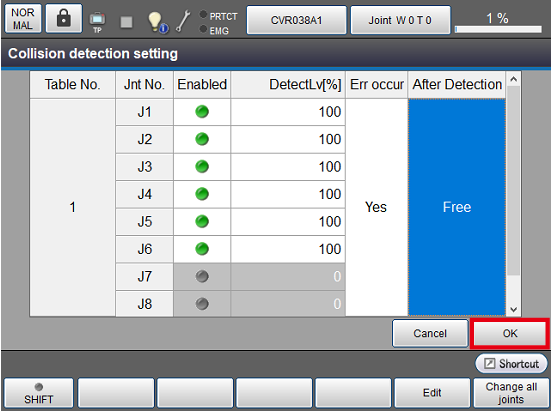
设定成轴自由时,按下[OK],则显示系统信息。
确认内容,按下[OK]。
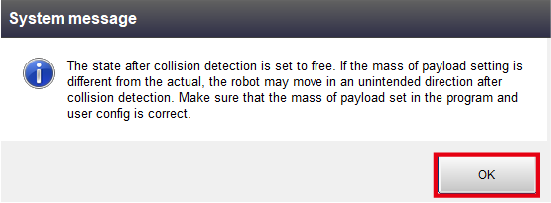
保存设定。
使用电动真空发生器时,显示以下的系统消息。
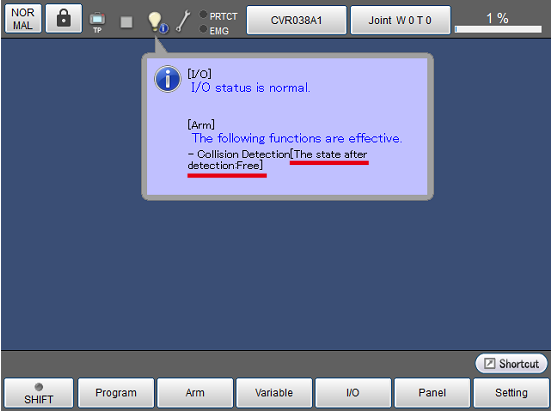
按下远程TP/虚拟TP的灯泡图标后,可确认当前设定。
ID : 2665