
ID : 7306
检测到碰撞时是否发生错误的设定
通过远程TP/虚拟TP或指令设定碰撞检测时是否发生错误。关于指令的详细内容,请参照“SetCollisionDetection”。
如将错误发生设定成[不执行],则即使检测到碰撞,也不会输出错误,机器人不会停止。从PLC等外部设备控制机器人,机器人检测到碰撞时也希望通过外部设备的控制停止时,请将错误发生设定成[不执行]。碰撞检测的状态可使用"GetCollisionStatus" 获取。
设定步骤
表示采用远程TP/虚拟TP操作的设定步骤。
1
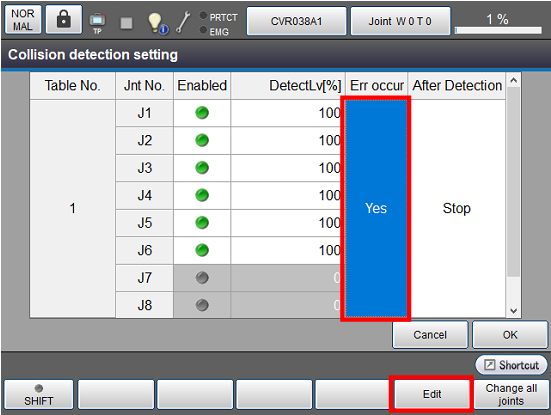
在设定碰撞检测画面中选择发生错误的项目并按压[F5 编辑]。
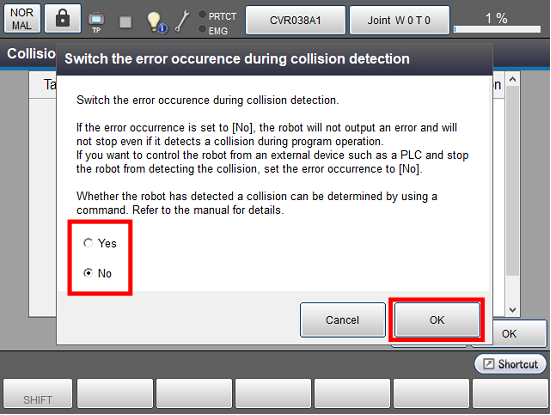
显示“检测到碰撞时是否发生错误的切换”后,选择[执行]或[不执行],再按压[OK]。
如果按压[Cancel],则不变更设定。
2
确认设定已变更,按[OK]。
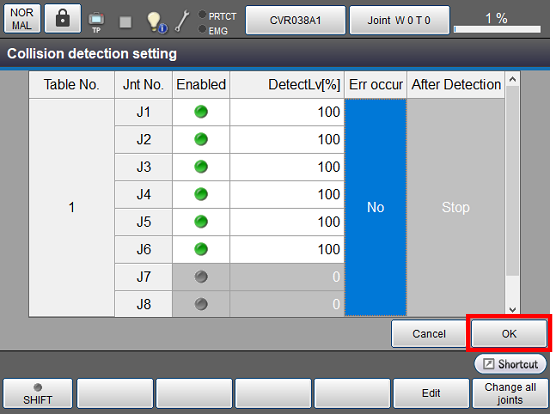
保存设定。
ID : 7306