
ID : 7304
有效/无效设定
使用远程TP/虚拟TP设定各轴碰撞检测功能有效/无效。初始值设定为所有轴有效。
设定步骤
表示采用远程TP/虚拟TP操作的设定步骤。
设定碰撞检测功能有效/无效时通过碰撞检测设定画面设定。
1
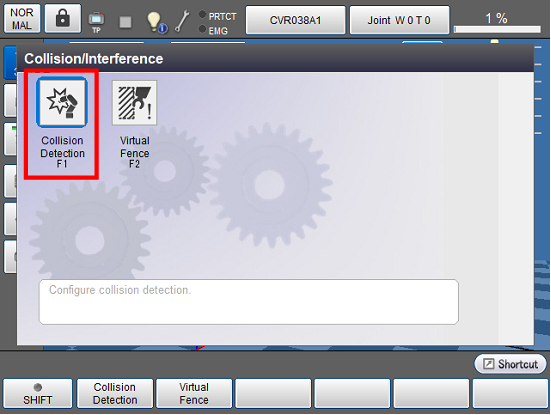
操作路径:基本画面 - [F2 机械臂] - [F6 辅助功能] - [F2 碰撞/干涉] - [F1 碰撞检测]
按下碰撞/干涉画面上的 [F1 碰撞检测] 。
2
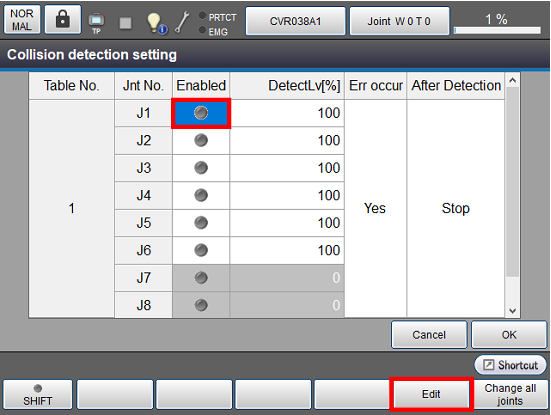
选择将碰撞检测功能设为有效的轴编号,按压各轴编号的[有效]或[F5 编辑]。
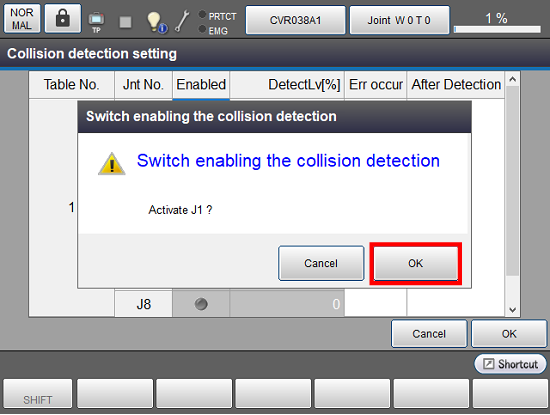
将显示系统讯息,没有问题则按压[OK]。
如果按压[Cancel],则不变更设定。
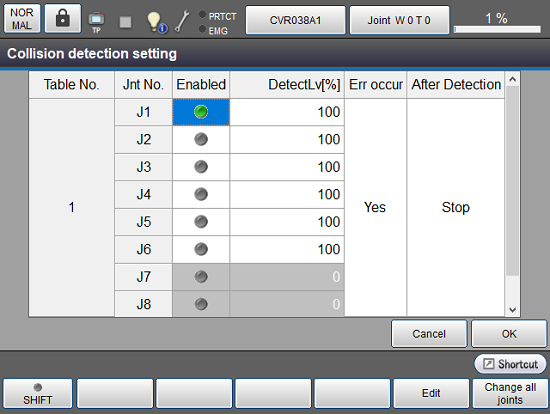
J1设为有效时,显示为绿色,如下所示。
3
通过STEP2步骤将需要设定的轴设定为有效。
统一变更所有轴时,按下[F6 切换所有轴]。
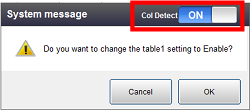
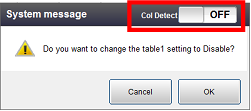
显示系统消息后将所有轴设为有效时,将碰撞检测设为[ON];无效时设为[OFF]后按压[OK]。
| 所有轴有效 | 所有轴无效 |
|---|---|
 |
 |
4
所有轴的设定完成后,按[OK]。
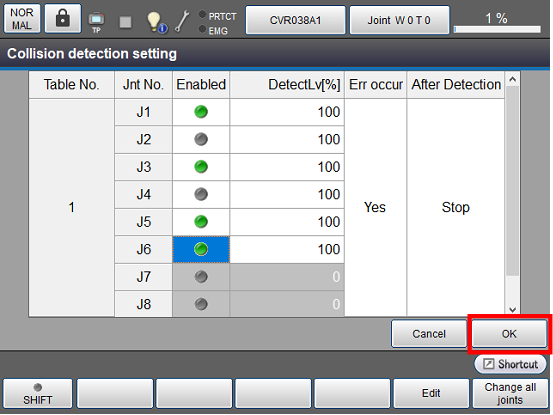
保存设定且指定轴的碰撞检测功能变为有效。
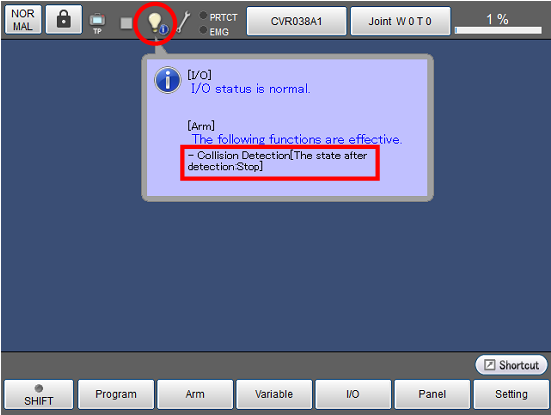
按下远程TP/虚拟TP的灯泡图标后可确认。
ID : 7304